Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Coverage and Exploration using Spatial Graph Neural Networks
Paper and Code
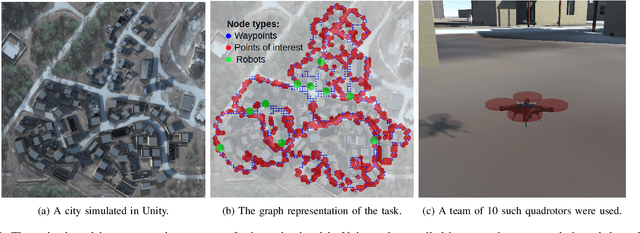
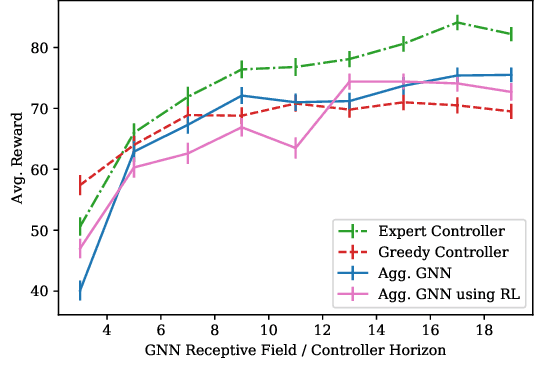
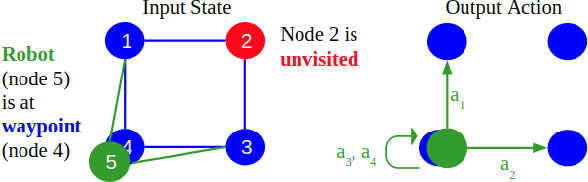
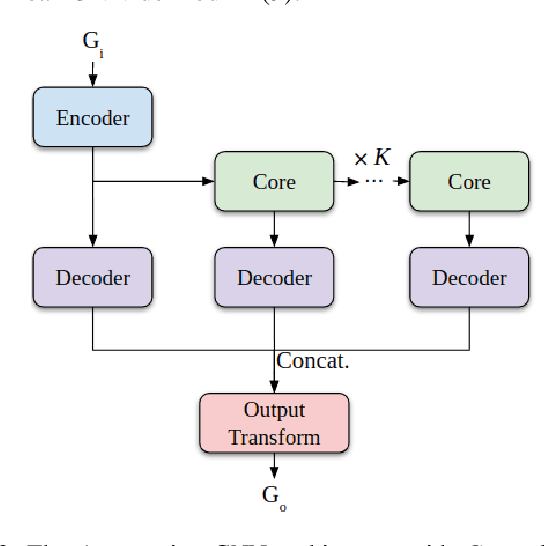
The multi-robot coverage problem is an essential building block for systems that perform tasks like inspection or search and rescue. We discretize the coverage problem to induce a spatial graph of locations and represent robots as nodes in the graph. Then, we train a Graph Neural Network controller that leverages the spatial equivariance of the task to imitate an expert open-loop routing solution. This approach generalizes well to much larger maps and larger teams that are intractable for the expert. In particular, the model generalizes effectively to a simulation of ten quadrotors and dozens of buildings. We also demonstrate the GNN controller can surpass planning-based approaches in an exploration task.
View paper on