 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Tracking in the Dark
Paper and Code
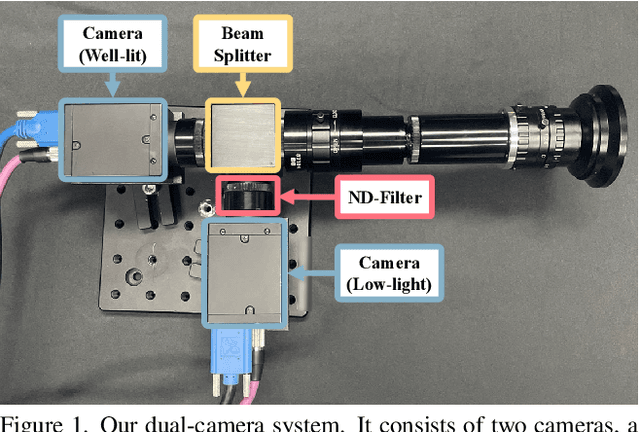
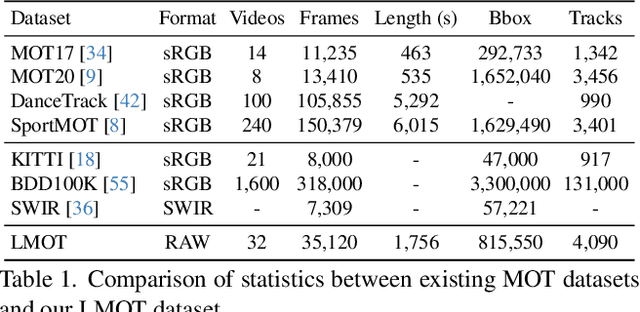
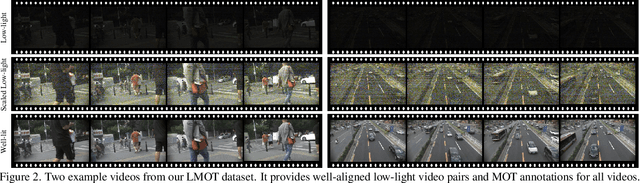
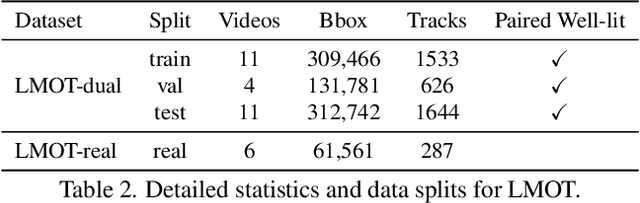
Low-light scenes are prevalent in real-world applications (e.g. autonomous driving and surveillance at night). Recently, multi-object tracking in various practical use cases have received much attention, but multi-object tracking in dark scenes is rarely considered. In this paper, we focus on multi-object tracking in dark scenes. To address the lack of datasets, we first build a Low-light Multi-Object Tracking (LMOT) dataset. LMOT provides well-aligned low-light video pairs captured by our dual-camera system, and high-quality multi-object tracking annotations for all videos. Then, we propose a low-light multi-object tracking method, termed as LTrack. We introduce the adaptive low-pass downsample module to enhance low-frequency components of images outside the sensor noises. The degradation suppression learning strategy enables the model to learn invariant information under noise disturbance and image quality degradation. These components improve the robustness of multi-object tracking in dark scenes. We conducted a comprehensive analysis of our LMOT dataset and proposed LTrack. Experimental results demonstrate the superiority of the proposed method and its competitiveness in real night low-light scenes. Dataset and Code: https: //github.com/ying-fu/LMOT