 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Object Grasping in the Plane
Paper and Code
Jun 01, 2022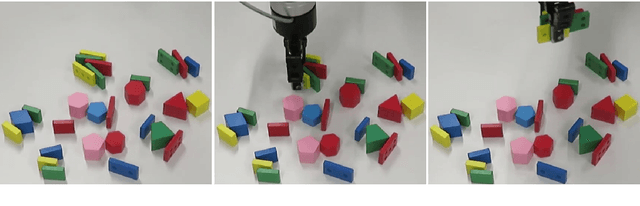

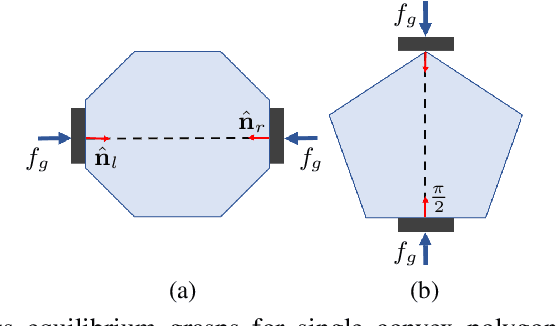
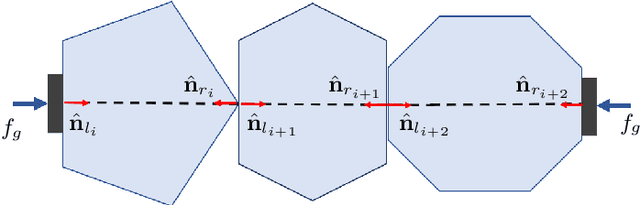
We consider the problem where multiple rigid convex polygonal objects rest in randomly placed positions and orientations on a planar surface visible from an overhead camera. The objective is to efficiently grasp and transport all objects into a bin. Specifically, we explore multi-object push-grasps where multiple objects are pushed together before the grasp can occur. We provide necessary conditions for multi-object push-grasps and apply these to filter inadmissible grasps in a novel multi-object grasp planner. We find that our planner is 19 times faster than a Mujoco simulator baseline. We also propose a picking algorithm that uses both single- and multi-object grasps to pick objects. In physical grasping experiments, compared to a single-object picking baseline, we find that the multi-object grasping system achieves 13.6% higher grasp success and is 59.9% faster. See https://sites.google.com/view/multi-object-grasping for videos, code, and data.