 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-modal Tracking for Object based SLAM
Paper and Code
Mar 14, 2016
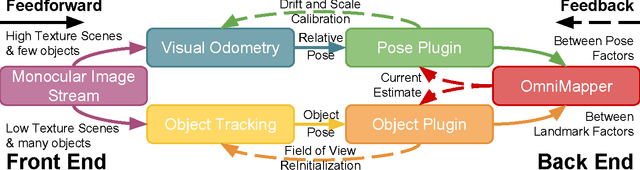
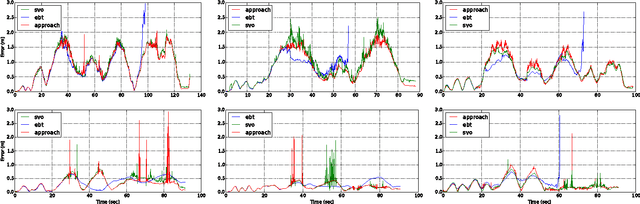
We present an on-line 3D visual object tracking framework for monocular cameras by incorporating spatial knowledge and uncertainty from semantic mapping along with high frequency measurements from visual odometry. Using a combination of vision and odometry that are tightly integrated we can increase the overall performance of object based tracking for semantic mapping. We present a framework for integration of the two data-sources into a coherent framework through information based fusion/arbitration. We demonstrate the framework in the context of OmniMapper[1] and present results on 6 challenging sequences over multiple objects compared to data obtained from a motion capture systems. We are able to achieve a mean error of 0.23m for per frame tracking showing 9% relative error less than state of the art tracker.