 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Camera Trajectory Forecasting with Trajectory Tensors
Paper and Code
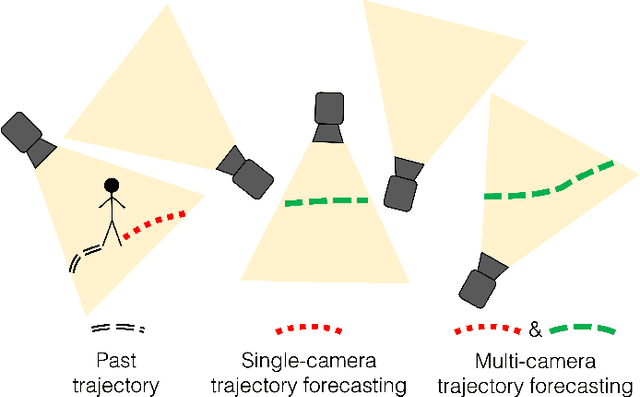
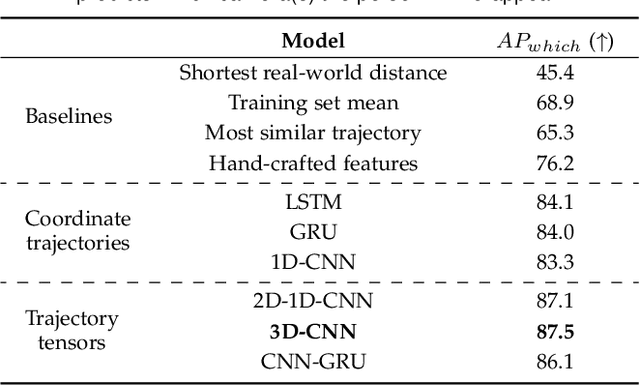
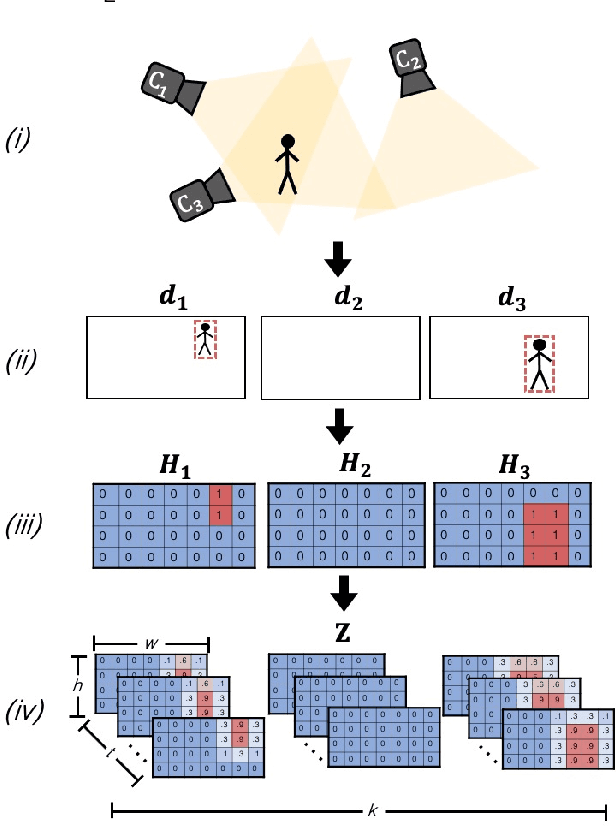
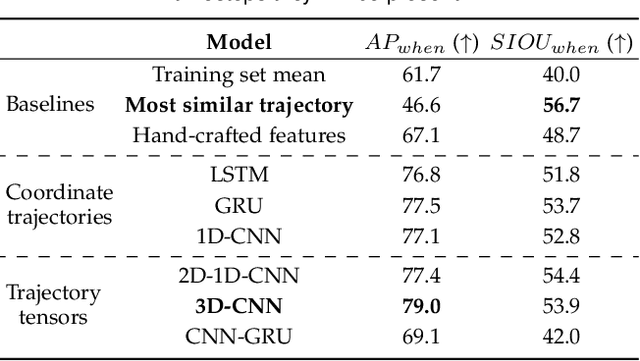
We introduce the problem of multi-camera trajectory forecasting (MCTF), which involves predicting the trajectory of a moving object across a network of cameras. While multi-camera setups are widespread for applications such as surveillance and traffic monitoring, existing trajectory forecasting methods typically focus on single-camera trajectory forecasting (SCTF), limiting their use for such applications. Furthermore, using a single camera limits the field-of-view available, making long-term trajectory forecasting impossible. We address these shortcomings of SCTF by developing an MCTF framework that simultaneously uses all estimated relative object locations from several viewpoints and predicts the object's future location in all possible viewpoints. Our framework follows a Which-When-Where approach that predicts in which camera(s) the objects appear and when and where within the camera views they appear. To this end, we propose the concept of trajectory tensors: a new technique to encode trajectories across multiple camera views and the associated uncertainties. We develop several encoder-decoder MCTF models for trajectory tensors and present extensive experiments on our own database (comprising 600 hours of video data from 15 camera views) created particularly for the MCTF task. Results show that our trajectory tensor models outperform coordinate trajectory-based MCTF models and existing SCTF methods adapted for MCTF. Code is available from: https://github.com/olly-styles/Trajectory-Tensors