Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Safe Planning with Gaussian Processes
Paper and Code
Aug 10, 2020
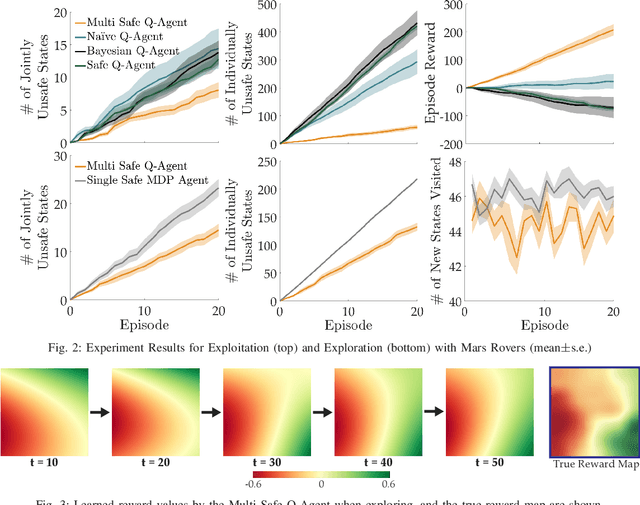

Multi-agent safe systems have become an increasingly important area of study as we can now easily have multiple AI-powered systems operating together. In such settings, we need to ensure the safety of not only each individual agent, but also the overall system. In this paper, we introduce a novel multi-agent safe learning algorithm that enables decentralized safe navigation when there are multiple different agents in the environment. This algorithm makes mild assumptions about other agents and is trained in a decentralized fashion, i.e. with very little prior knowledge about other agents' policies. Experiments show our algorithm performs well with the robots running other algorithms when optimizing various objectives.
* 9 pages, 5 figures. Published at IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS) 2020
View paper on