 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent Motion Planning from Signal Temporal Logic Specifications
Paper and Code
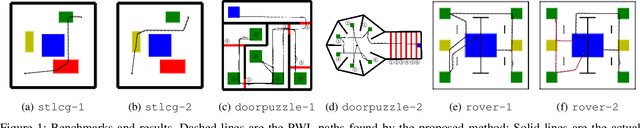
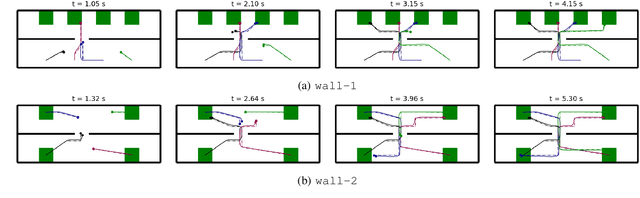
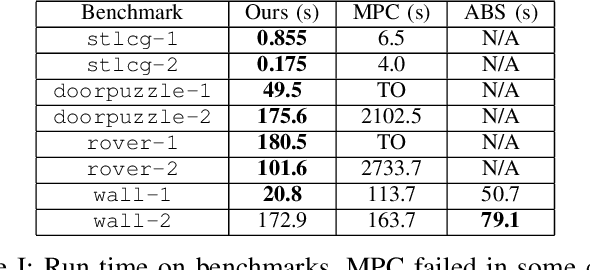
We tackle the challenging problem of multi-agent cooperative motion planning for complex tasks described using signal temporal logic (STL), where robots can have nonlinear and nonholonomic dynamics. Existing methods in multi-agent motion planning, especially those based on discrete abstractions and model predictive control (MPC), suffer from limited scalability with respect to the complexity of the task, the size of the workspace, and the planning horizon. We present a method based on {\em timed waypoints\/} to address this issue. We show that timed waypoints can help abstract nonlinear behaviors of the system as safety envelopes around the reference path defined by those waypoints. Then the search for waypoints satisfying the STL specifications can be inductively encoded as a mixed-integer linear program. The agents following the synthesized timed waypoints have their tasks automatically allocated, and are guaranteed to satisfy the STL specifications while avoiding collisions. We evaluate the algorithm on a wide variety of benchmarks. Results show that it supports multi-agent planning from complex specification over long planning horizons, and significantly outperforms state-of-the-art abstraction-based and MPC-based motion planning methods. The implementation is available at https://github.com/sundw2014/STLPlanning.