 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Exploration of an Unknown Sparse Landmark Complex via Deep Reinforcement Learning
Paper and Code
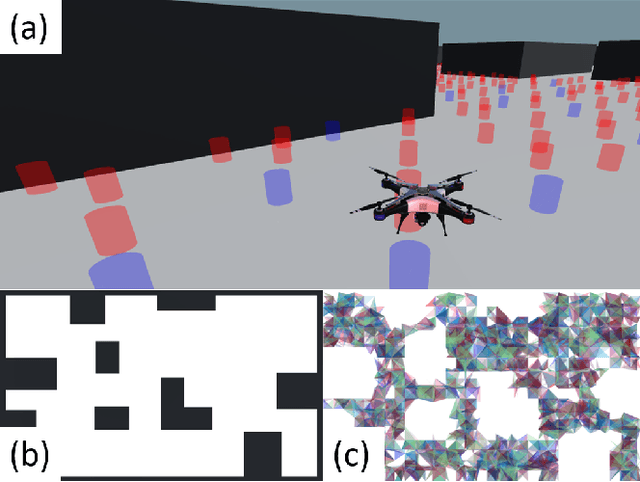
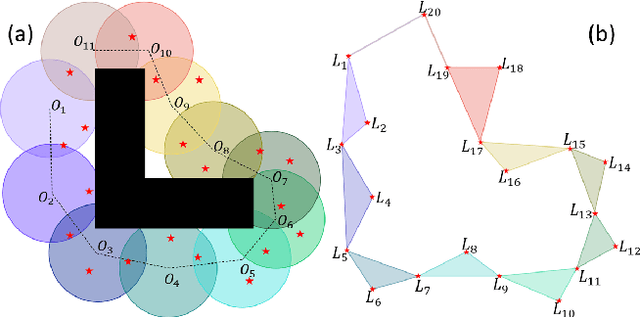
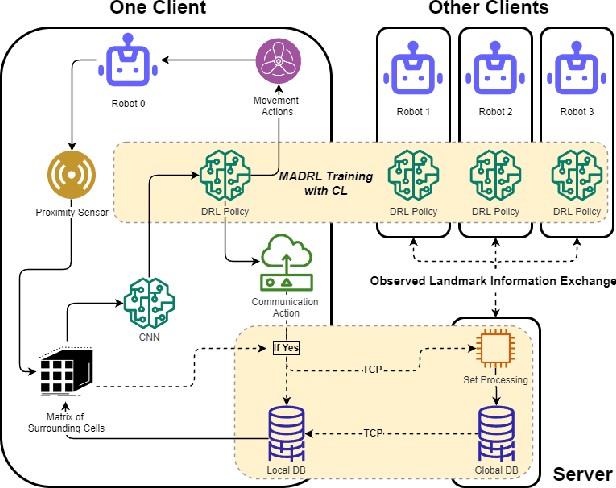
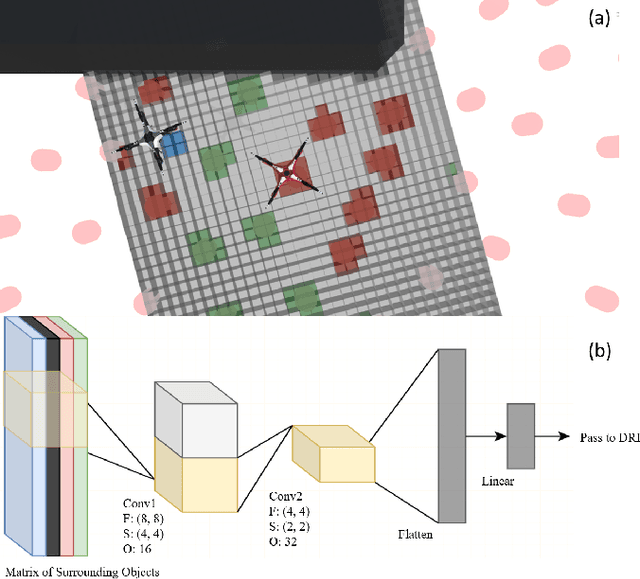
In recent years Landmark Complexes have been successfully employed for localization-free and metric-free autonomous exploration using a group of sensing-limited and communication-limited robots in a GPS-denied environment. To ensure rapid and complete exploration, existing works make assumptions on the density and distribution of landmarks in the environment. These assumptions may be overly restrictive, especially in hazardous environments where landmarks may be destroyed or completely missing. In this paper, we first propose a deep reinforcement learning framework for multi-agent cooperative exploration in environments with sparse landmarks while reducing client-server communication. By leveraging recent development on partial observability and credit assignment, our framework can train the exploration policy efficiently for multi-robot systems. The policy receives individual rewards from actions based on a proximity sensor with limited range and resolution, which is combined with group rewards to encourage collaborative exploration and construction of the Landmark Complex through observation of 0-, 1- and 2-dimensional simplices. In addition, we employ a three-stage curriculum learning strategy to mitigate the reward sparsity by gradually adding random obstacles and destroying random landmarks. Experiments in simulation demonstrate that our method outperforms the state-of-the-art landmark complex exploration method in efficiency among different environments with sparse landmarks.