 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Active Search using Detection and Location Uncertainty
Paper and Code
Mar 09, 2022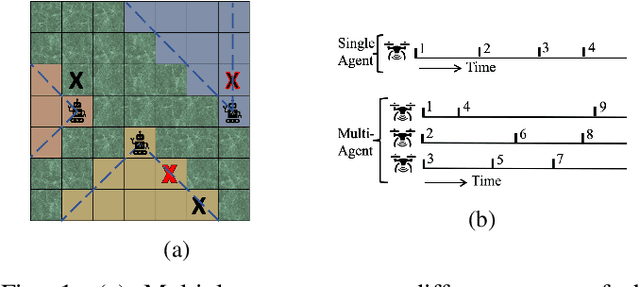
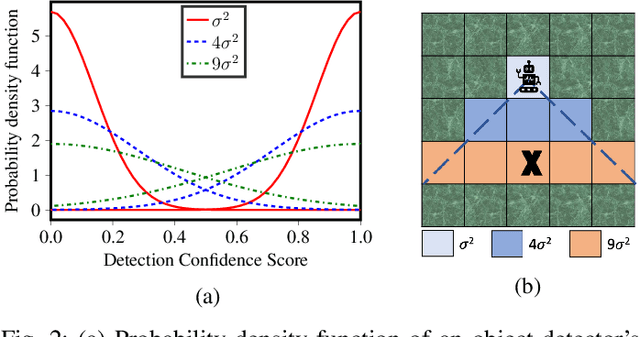
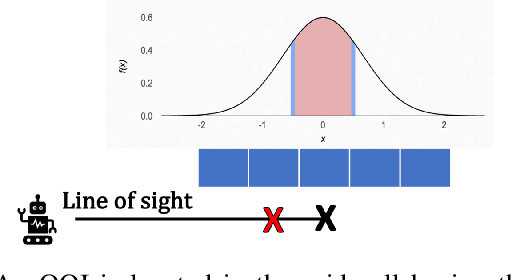
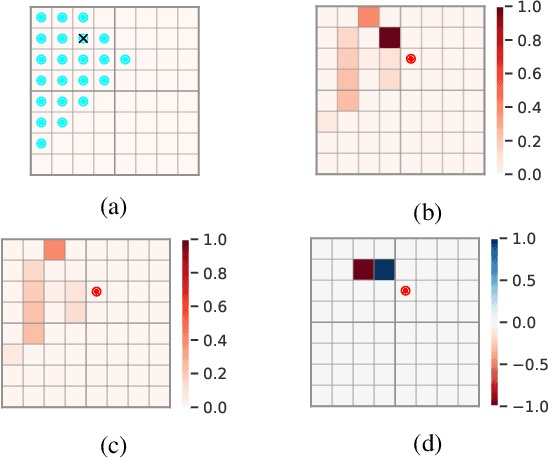
Active search refers to the task of autonomous robots (agents) detecting objects of interest (targets) in a search space using decision making algorithms that adapt to the history of their observations. It has important applications in search and rescue missions, wildlife patrolling and environment monitoring. Active search algorithms must contend with two types of uncertainty: detection uncertainty and location uncertainty. Prior work has typically focused on one of these while ignoring or engineering away the other. The more common approach in robotics is to focus on location uncertainty and remove detection uncertainty by thresholding the detection probability to zero or one. On the other hand, it is common in the sparse signal processing literature to assume the target location is accurate and focus on the uncertainty of its detection. In this work, we propose an inference method to jointly handle both target detection and location uncertainty. We then build a decision making algorithm on this inference method that uses Thompson sampling to enable efficient active search in both the single agent and multi-agent settings. We perform experiments in simulation over varying number of agents and targets to show that our inference and decision making algorithms outperform competing baselines that only account for either target detection or location uncertainty.