 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMS2MP: A Min-Sum Message Passing Algorithm for Motion Planning
Paper and Code
Mar 07, 2022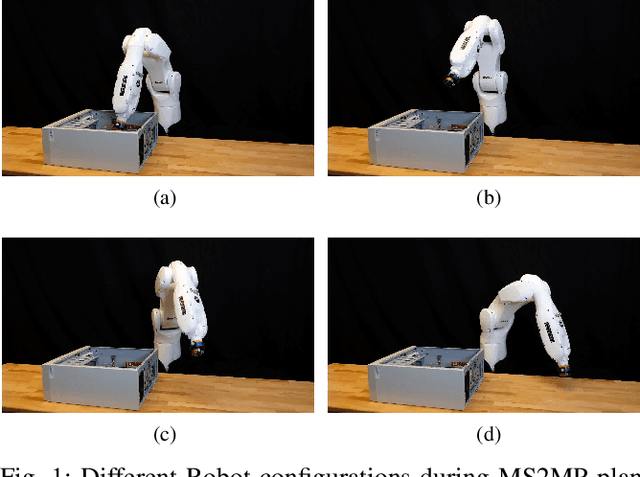
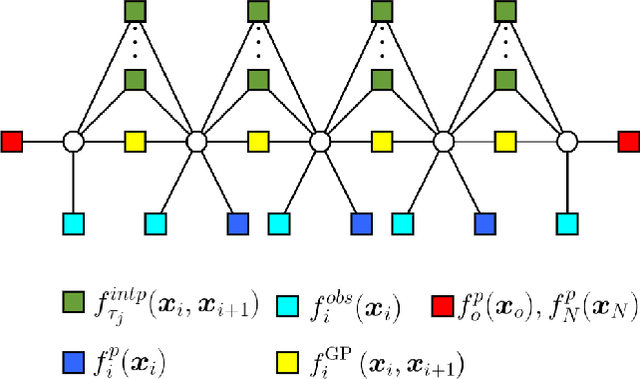
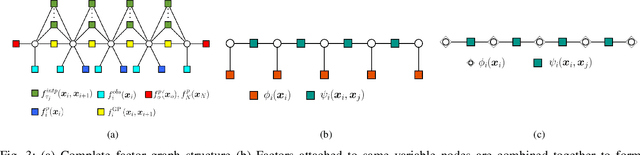
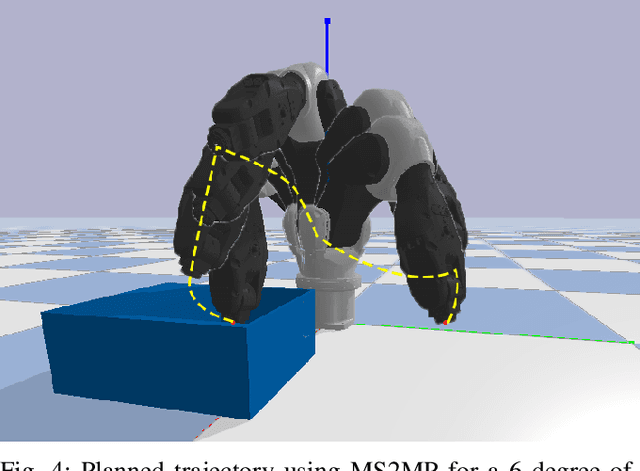
Gaussian Process (GP) formulation of continuoustime trajectory offers a fast solution to the motion planning problem via probabilistic inference on factor graph. However, often the solution converges to in-feasible local minima and the planned trajectory is not collision-free. We propose a message passing algorithm that is more sensitive to obstacles with fast convergence time. We leverage the utility of min-sum message passing algorithm that performs local computations at each node to solve the inference problem on factor graph. We first introduce the notion of compound factor node to transform the factor graph to a linearly structured graph. We next develop an algorithm denoted as Min-sum Message Passing algorithm for Motion Planning (MS2MP) that combines numerical optimization with message passing to find collision-free trajectories. MS2MP performs numerical optimization to solve non-linear least square minimization problem at each compound factor node and then exploits the linear structure of factor graph to compute the maximum a posteriori (MAP) estimation of complete graph by passing messages among graph nodes. The decentralized optimization approach of each compound node increases sensitivity towards avoiding obstacles for harder planning problems. We evaluate our algorithm by performing extensive experiments for exemplary motion planning tasks for a robot manipulator. Our evaluation reveals that MS2MP improves existing work in convergence time and success rate.