Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMPC path-planner for autonomous driving solved by genetic algorithm technique
Paper and Code
Feb 01, 2021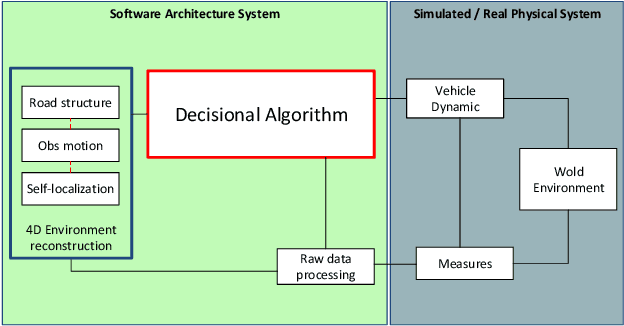
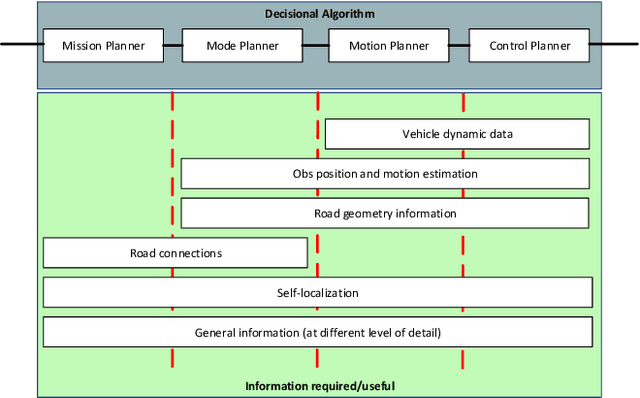
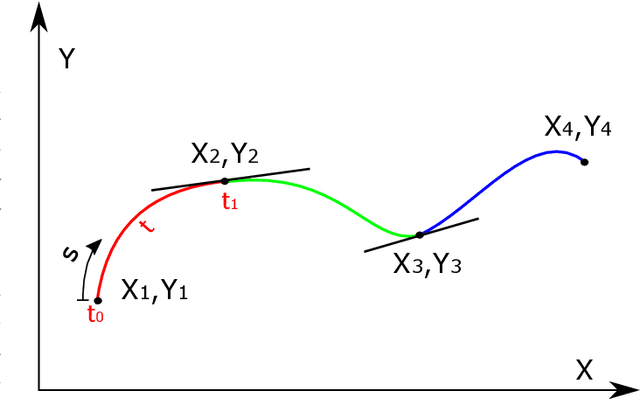
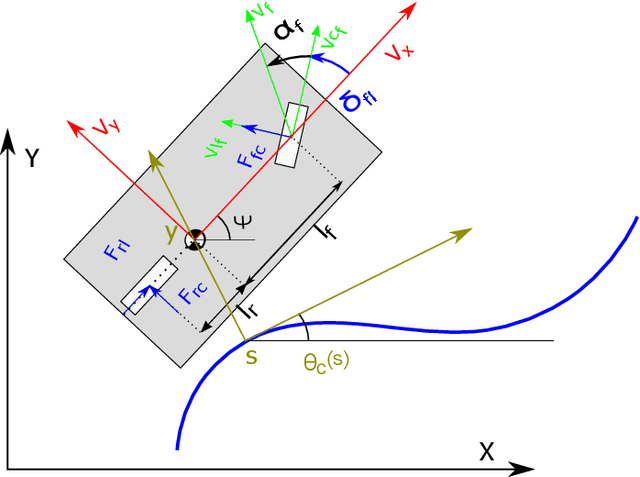
Autonomous vehicle's technology is expected to be disruptive for automotive industry in next years. This paper proposes a novel real-time trajectory planner based on a Nonlinear Model Predictive Control (NMPC) algorithm. A nonlinear single track vehicle model with Pacejka's lateral tyre formulas has been implemented. The numerical solution of the NMPC problem is obtained by means of the implementation of a novel genetic algorithm strategy. Numerical results are discussed through simulations that shown a reasonable behavior of the proposed strategy in presence of static or moving obstacles as well as in a wide rage of road friction conditions. Moreover a real-time implementation is made possible by the reported computational time analysis.
View paper on