 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotionGS : Compact Gaussian Splatting SLAM by Motion Filter
Paper and Code
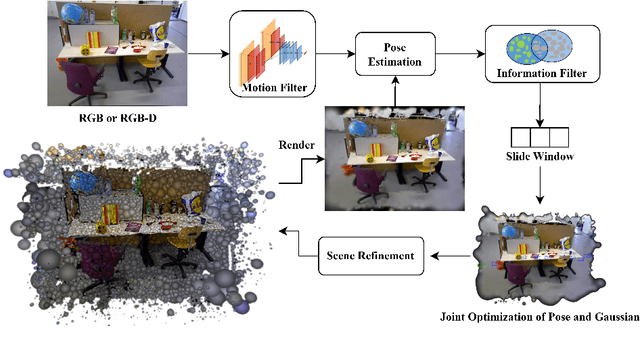
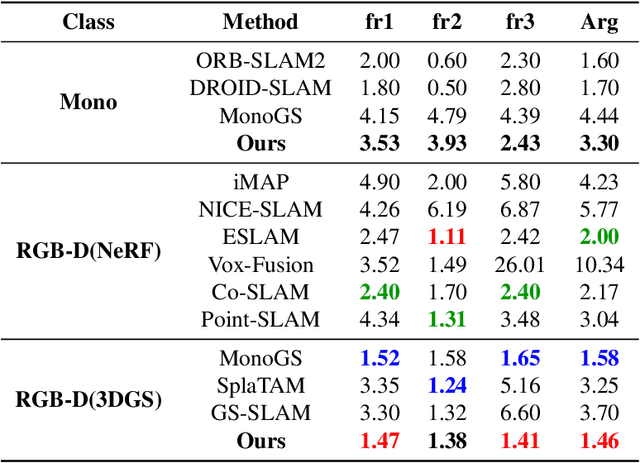
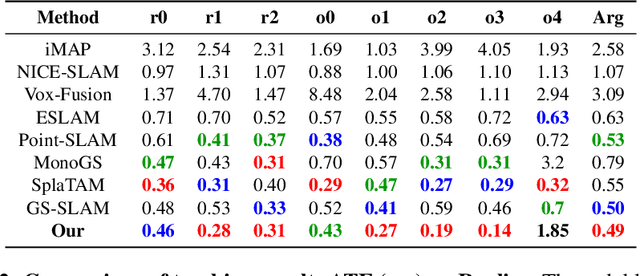
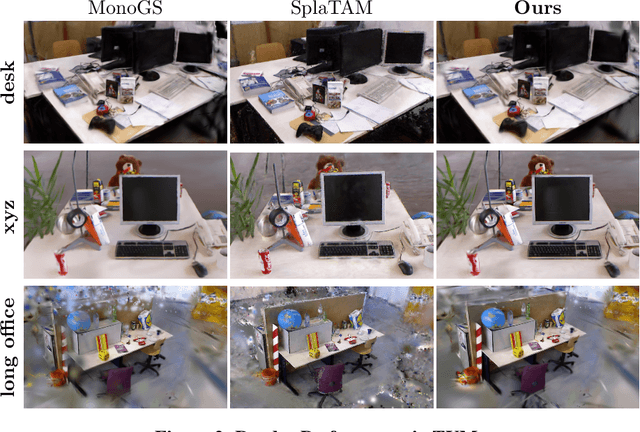
With their high-fidelity scene representation capability, the attention of SLAM field is deeply attracted by the Neural Radiation Field (NeRF) and 3D Gaussian Splatting (3DGS). Recently, there has been a Surge in NeRF-based SLAM, while 3DGS-based SLAM is sparse. A novel 3DGS-based SLAM approach with a fusion of deep visual feature, dual keyframe selection and 3DGS is presented in this paper. Compared with the existing methods, the proposed selectively tracking is achieved by feature extraction and motion filter on each frame. The joint optimization of pose and 3D Gaussian runs through the entire mapping process. Additionally, the coarse-to-fine pose estimation and compact Gaussian scene representation are implemented by dual keyfeature selection and novel loss functions. Experimental results demonstrate that the proposed algorithm not only outperforms the existing methods in tracking and mapping, but also has less memory usage.