 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Heterogeneous Unmanned Systems under Partial Observation from UAV
Paper and Code
Jul 28, 2020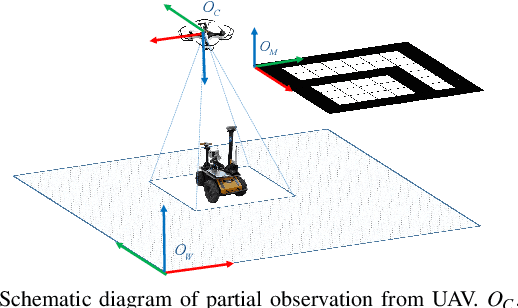
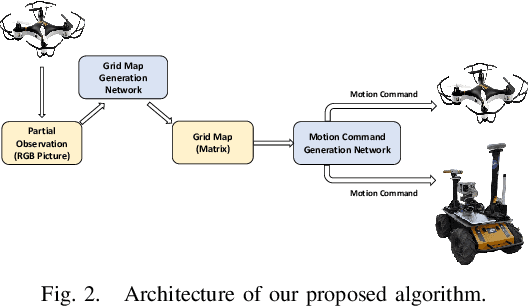
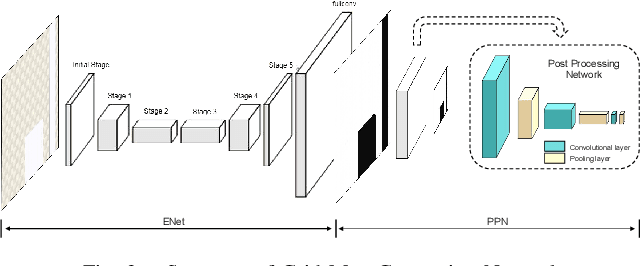
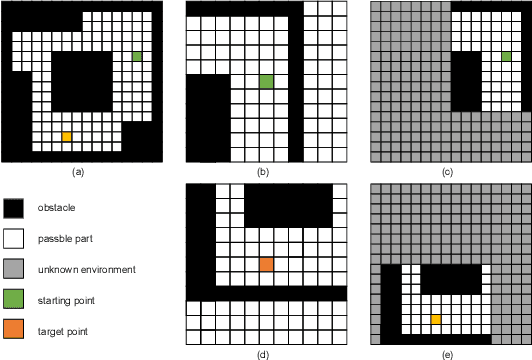
For heterogeneous unmanned systems composed of unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs), using UAVs serve as eyes to assist UGVs in motion planning is a promising research direction due to the UAVs' vast view scope. However, due to UAVs flight altitude limitations, it may be impossible to observe the global map, and motion planning in the local map is a POMDP (Partially Observable Markov Decision Process) problem. This paper proposes a motion planning algorithm for heterogeneous unmanned system under partial observation from UAV without reconstruction of global maps, which consists of two parts designed for perception and decision-making, respectively. For the perception part, we propose the Grid Map Generation Network (GMGN), which is used to perceive scenes from UAV's perspective and classify the pathways and obstacles. For the decision-making part, we propose the Motion Command Generation Network (MCGN). Due to the addition of memory mechanism, MCGN has planning and reasoning abilities under partial observation from UAVs. We evaluate our proposed algorithm by comparing with baseline algorithms. The results show that our method effectively plans the motion of heterogeneous unmanned systems and achieves a relatively high success rate.