 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning for Global Localization in Non-Gaussian Belief Spaces
Paper and Code
Feb 27, 2016
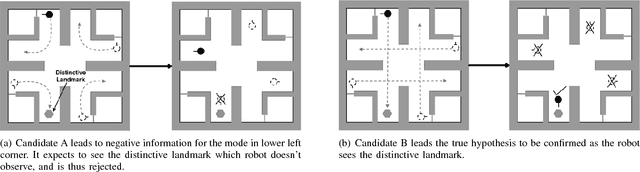
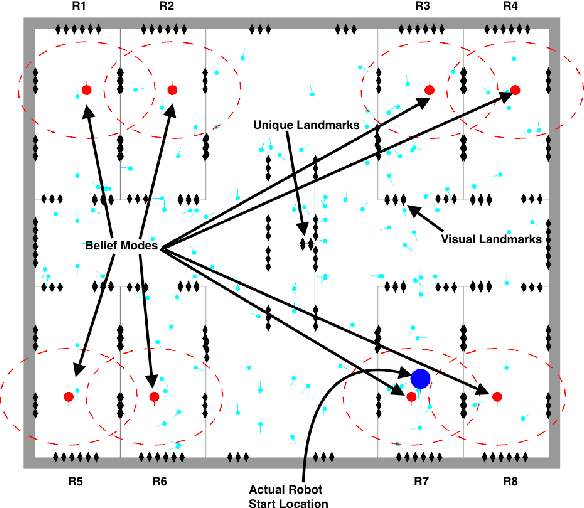
This paper presents a method for motion planning under uncertainty to deal with situations where ambiguous data associations result in a multimodal hypothesis on the robot state. In the global localization problem, sometimes referred to as the "lost or kidnapped robot problem", given little to no a priori pose information, the localization algorithm should recover the correct pose of a mobile robot with respect to a global reference frame. We present a Receding Horizon approach, to plan actions that sequentially disambiguate a multimodal belief to achieve tight localization on the correct pose in finite time, i.e., converge to a unimodal belief. Experimental results are presented using a physical ground robot operating in an artificial maze-like environment. We demonstrate two runs wherein the robot is given no a priori information about its initial pose and the planner is tasked to localize the robot.