Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion based Extrinsic Calibration of a 3D Lidar and an IMU
Paper and Code
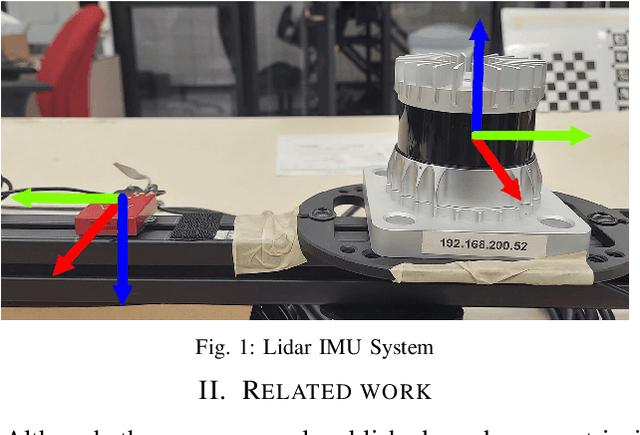
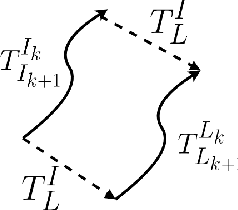

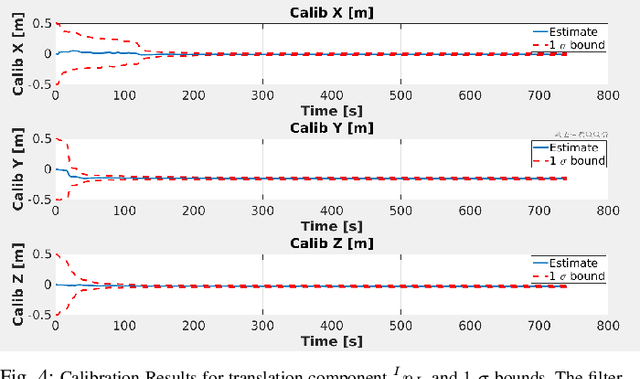
This work presents a novel extrinsic calibration estimation algorithm between a 3D Lidar and an IMU using an Extended Kalman Filter which exploits the motion based calibration constraint for state update. The steps include, data collection by moving the Lidar Inertial sensor suite randomly along all degrees of freedom, determination of the inter sensor rotation by using rotational component of the aforementioned motion based calibration constraint in a least squares optimization framework, and finally determination of inter sensor translation using the motion based calibration constraint in an Extended Kalman Filter (EKF) framework. We experimentally validate our method on data collected in our lab.
View paper on