 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMore than a Million Ways to Be Pushed: A High-Fidelity Experimental Dataset of Planar Pushing
Paper and Code
Aug 04, 2016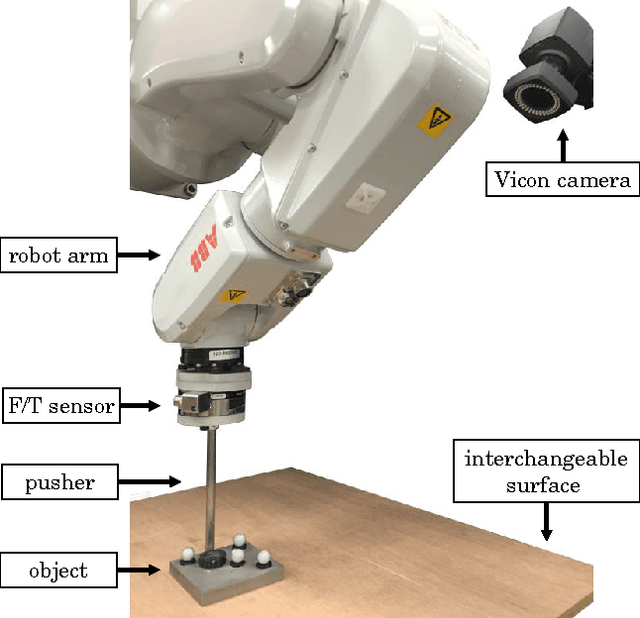
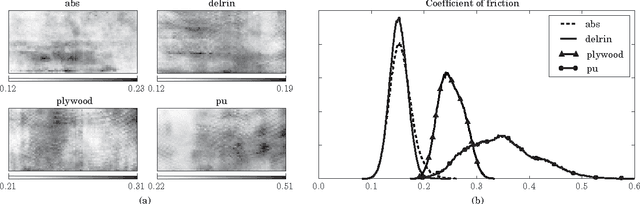
Pushing is a motion primitive useful to handle objects that are too large, too heavy, or too cluttered to be grasped. It is at the core of much of robotic manipulation, in particular when physical interaction is involved. It seems reasonable then to wish for robots to understand how pushed objects move. In reality, however, robots often rely on approximations which yield models that are computable, but also restricted and inaccurate. Just how close are those models? How reasonable are the assumptions they are based on? To help answer these questions, and to get a better experimental understanding of pushing, we present a comprehensive and high-fidelity dataset of planar pushing experiments. The dataset contains timestamped poses of a circular pusher and a pushed object, as well as forces at the interaction.We vary the push interaction in 6 dimensions: surface material, shape of the pushed object, contact position, pushing direction, pushing speed, and pushing acceleration. An industrial robot automates the data capturing along precisely controlled position-velocity-acceleration trajectories of the pusher, which give dense samples of positions and forces of uniform quality. We finish the paper by characterizing the variability of friction, and evaluating the most common assumptions and simplifications made by models of frictional pushing in robotics.