 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMonitored Distillation for Positive Congruent Depth Completion
Paper and Code
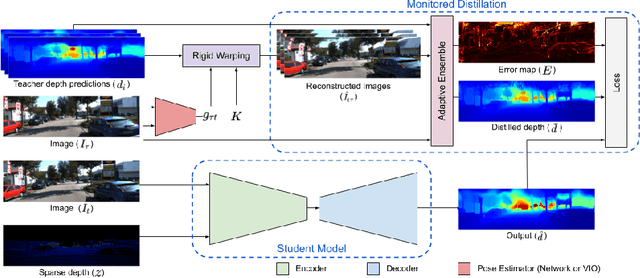
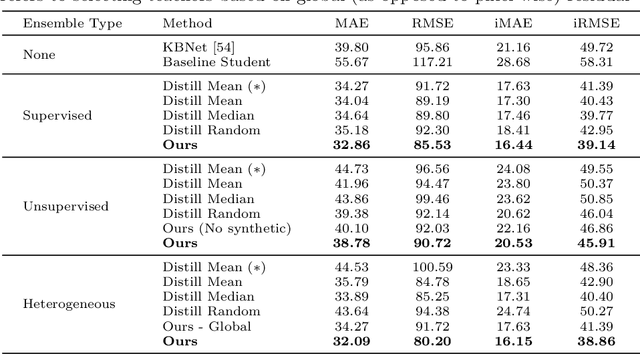
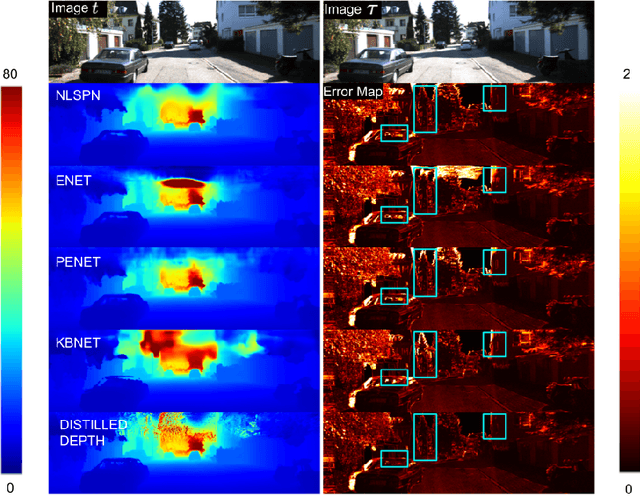
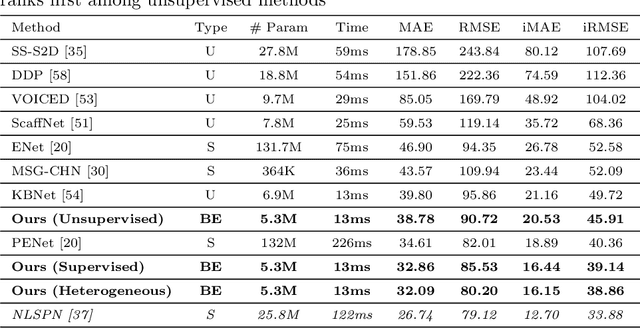
We propose a method to infer a dense depth map from a single image, its calibration, and the associated sparse point cloud. In order to leverage existing models that produce putative depth maps (teacher models), we propose an adaptive knowledge distillation approach that yields a positive congruent training process, where a student model avoids learning the error modes of the teachers. We consider the scenario of a blind ensemble where we do not have access to ground truth for model selection nor training. The crux of our method, termed Monitored Distillation, lies in a validation criterion that allows us to learn from teachers by choosing predictions that best minimize the photometric reprojection error for a given image. The result of which is a distilled depth map and a confidence map, or "monitor", for how well a prediction from a particular teacher fits the observed image. The monitor adaptively weights the distilled depth where, if all of the teachers exhibit high residuals, the standard unsupervised image reconstruction loss takes over as the supervisory signal. On indoor scenes (VOID), we outperform blind ensembling baselines by 13.3% and unsupervised methods by 20.3%; we boast a 79% model size reduction while maintaining comparable performance to the best supervised method. For outdoors (KITTI), we tie for 5th overall on the benchmark despite not using ground truth.