 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModification of Gesture-Determined-Dynamic Function with Consideration of Margins for Motion Planning of Humanoid Robots
Paper and Code
Aug 16, 2020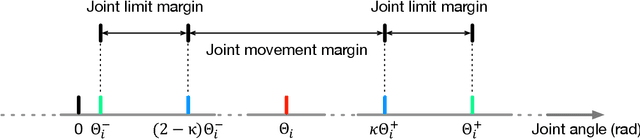
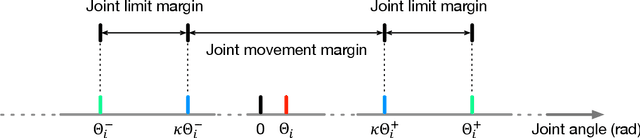
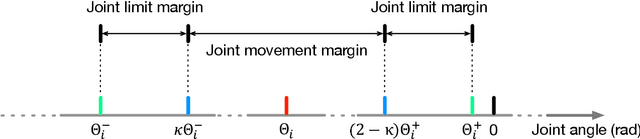
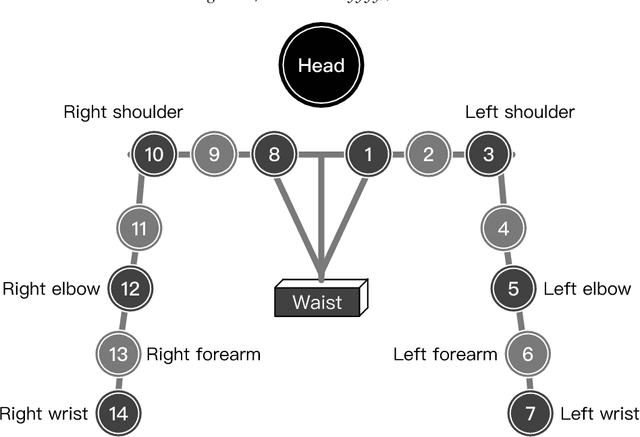
The gesture-determined-dynamic function (GDDF) offers an effective way to handle the control problems of humanoid robots. Specifically, GDDF is utilized to constrain the movements of dual arms of humanoid robots and steer specific gestures to conduct demanding tasks under certain conditions. However, there is still a deficiency in this scheme. Through experiments, we found that the joints of the dual arms, which can be regarded as the redundant manipulators, could exceed their limits slightly at the joint angle level. The performance straightly depends on the parameters designed beforehand for the GDDF, which causes a lack of adaptability to the practical applications of this method. In this paper, a modified scheme of GDDF with consideration of margins (MGDDF) is proposed. This MGDDF scheme is based on quadratic programming (QP) framework, which is widely applied to solving the redundancy resolution problems of robot arms. Moreover, three margins are introduced in the proposed MGDDF scheme to avoid joint limits. With consideration of these margins, the joints of manipulators of the humanoid robots will not exceed their limits, and the potential damages which might be caused by exceeding limits will be completely avoided. Computer simulations conducted on MATLAB further verify the feasibility and superiority of the proposed MGDDF scheme.