 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling Interactions of Autonomous Vehicles and Pedestrians with Deep Multi-Agent Reinforcement Learning for Collision Avoidance
Paper and Code
Sep 30, 2021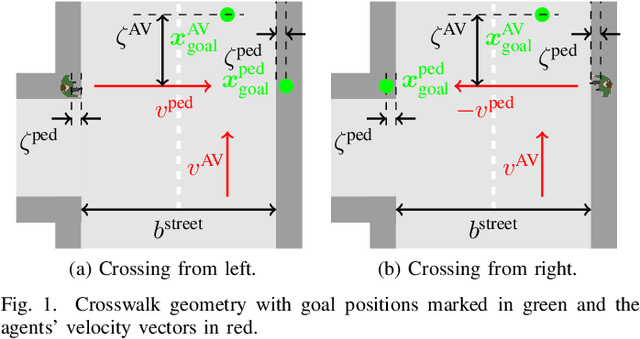

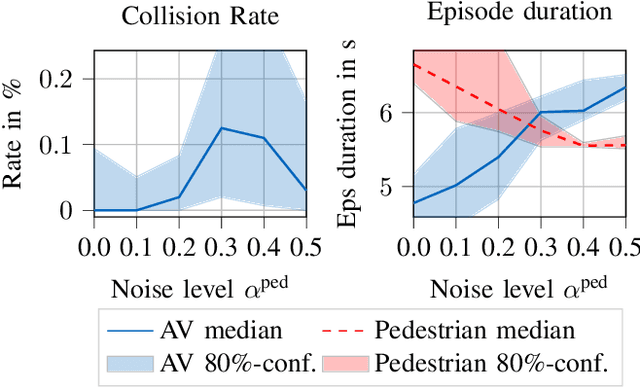
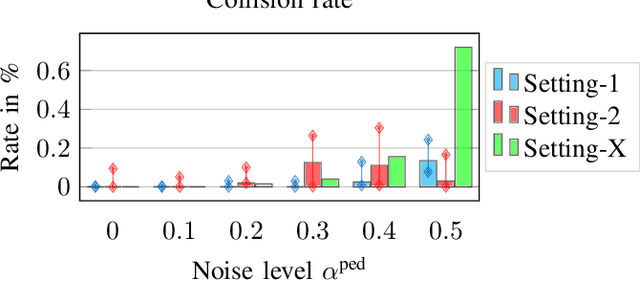
Reliable pedestrian crash avoidance mitigation (PCAM) systems are crucial components of safe autonomous vehicles (AVs). The sequential nature of the vehicle-pedestrian interaction, i.e., where immediate decisions of one agent directly influence the following decisions of the other agent, is an often neglected but important aspect. In this work, we model the corresponding interaction sequence as a Markov decision process (MDP) that is solved by deep reinforcement learning (DRL) algorithms to define the PCAM system's policy. The simulated driving scenario is based on an AV acting as a DRL agent driving along an urban street, facing a pedestrian at an unmarked crosswalk who tries to cross. Since modeling realistic crossing behavior of the pedestrian is challenging, we introduce two levels of intelligent pedestrian behavior: While the baseline model follows a predefined strategy, our advanced model captures continuous learning and the inherent uncertainty in human behavior by defining the pedestrian as a second DRL agent, i.e., we introduce a deep multi-agent reinforcement learning (DMARL) problem. The presented PCAM system with different levels of intelligent pedestrian behavior is benchmarked according to the agents' collision rate and the resulting traffic flow efficiency. In this analysis, our focus lies on evaluating the influence of observation noise on the decision making of the agents. The results show that the AV is able to completely mitigate collisions under the majority of the investigated conditions and that the DRL-based pedestrian model indeed learns a more human-like crossing behavior.