 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Based Planning with Energy Based Models
Paper and Code
Sep 15, 2019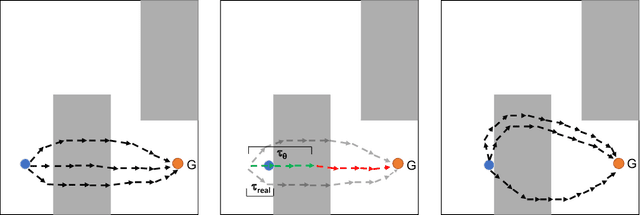

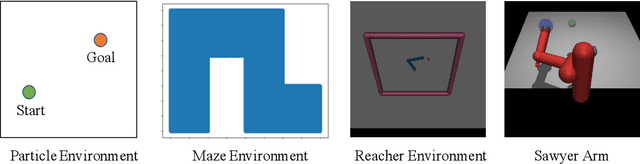
Model-based planning holds great promise for improving both sample efficiency and generalization in reinforcement learning (RL). We show that energy-based models (EBMs) are a promising class of models to use for model-based planning. EBMs naturally support inference of intermediate states given start and goal state distributions. We provide an online algorithm to train EBMs while interacting with the environment, and show that EBMs allow for significantly better online learning than corresponding feed-forward networks. We further show that EBMs support maximum entropy state inference and are able to generate diverse state space plans. We show that inference purely in state space - without planning actions - allows for better generalization to previously unseen obstacles in the environment and prevents the planner from exploiting the dynamics model by applying uncharacteristic action sequences. Finally, we show that online EBM training naturally leads to intentionally planned state exploration which performs significantly better than random exploration.