 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMIMC-VINS: A Versatile and Resilient Multi-IMU Multi-Camera Visual-Inertial Navigation System
Paper and Code
Jun 28, 2020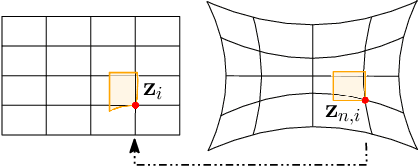
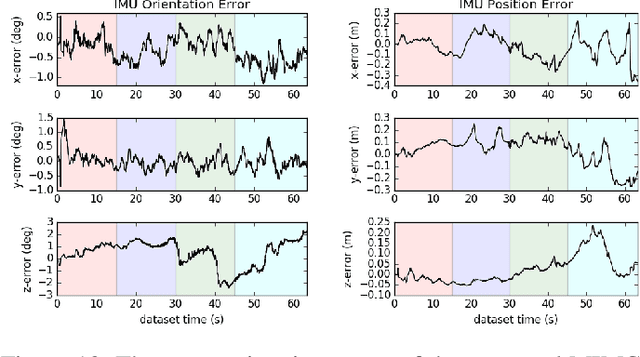
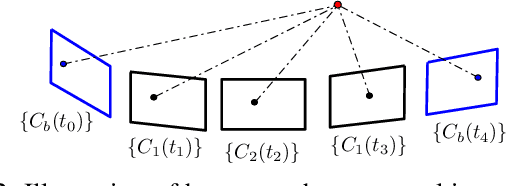
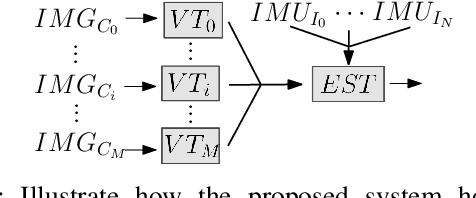
As cameras and inertial sensors are becoming ubiquitous in mobile devices and robots, it holds great potential to design visual-inertial navigation systems (VINS) for efficient versatile 3D motion tracking which utilize any (multiple) available cameras and inertial measurement units (IMUs) and are resilient to sensor failures or measurement depletion. To this end, rather than the standard VINS paradigm using a minimal sensing suite of a single camera and IMU, in this paper we design a real-time consistent multi-IMU multi-camera (MIMC)-VINS estimator that is able to seamlessly fuse multi-modal information from an arbitrary number of uncalibrated cameras and IMUs. Within an efficient multi-state constraint Kalman filter (MSCKF) framework, the proposed MIMC-VINS algorithm optimally fuses asynchronous measurements from all sensors, while providing smooth, uninterrupted, and accurate 3D motion tracking even if some sensors fail. The key idea of the proposed MIMC-VINS is to perform high-order on-manifold state interpolation to efficiently process all available visual measurements without increasing the computational burden due to estimating additional sensors' poses at asynchronous imaging times. In order to fuse the information from multiple IMUs, we propagate a joint system consisting of all IMU states while enforcing rigid-body constraints between the IMUs during the filter update stage. Lastly, we estimate online both spatiotemporal extrinsic and visual intrinsic parameters to make our system robust to errors in prior sensor calibration. The proposed system is extensively validated in both Monte-Carlo simulations and real-world experiments.