 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta Neural Ordinary Differential Equations For Adaptive Asynchronous Control
Paper and Code
Jul 25, 2022

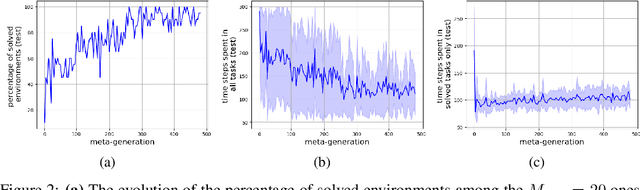
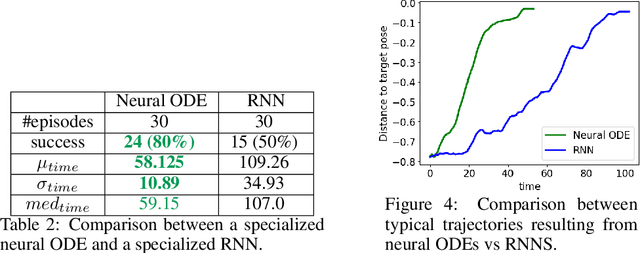
Model-based Reinforcement Learning and Control have demonstrated great potential in various sequential decision making problem domains, including in robotics settings. However, real-world robotics systems often present challenges that limit the applicability of those methods. In particular, we note two problems that jointly happen in many industrial systems: 1) Irregular/asynchronous observations and actions and 2) Dramatic changes in environment dynamics from an episode to another (e.g. varying payload inertial properties). We propose a general framework that overcomes those difficulties by meta-learning adaptive dynamics models for continuous-time prediction and control. We evaluate the proposed approach on a simulated industrial robot. Evaluations on real robotic systems will be added in future iterations of this pre-print.