 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Control: Automatic Model-based Control Synthesis for Heterogeneous Robot Skills
Paper and Code
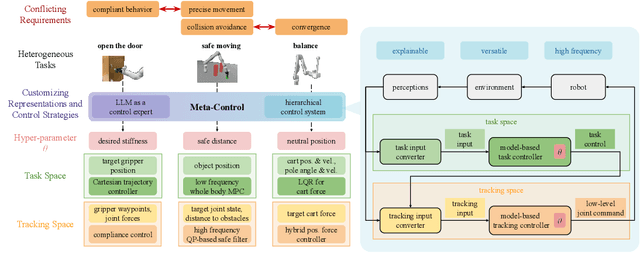
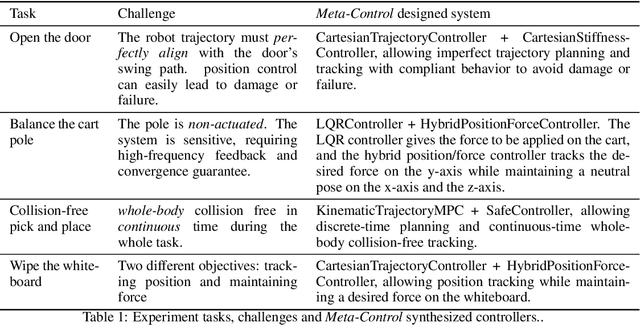
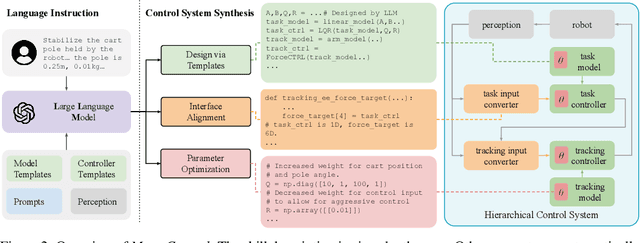
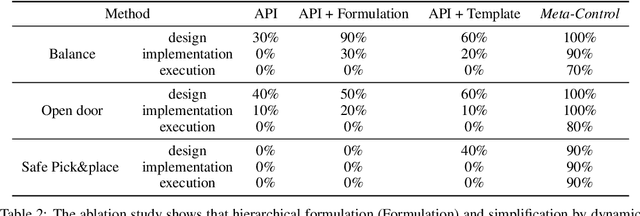
The requirements for real-world manipulation tasks are diverse and often conflicting; some tasks necessitate force constraints or collision avoidance, while others demand high-frequency feedback. Satisfying these varied requirements with a fixed state-action representation and control strategy is challenging, impeding the development of a universal robotic foundation model. In this work, we propose Meta-Control, the first LLM-enabled automatic control synthesis approach that creates customized state representations and control strategies tailored to specific tasks. Meta-Control leverages a generic hierarchical control framework to address a wide range of heterogeneous tasks. Our core insight is the decomposition of the state space into an abstract task space and a concrete tracking space. By harnessing LLM's extensive common sense and control knowledge, we enable the LLM to design these spaces, including states, dynamic models, and controllers, using pre-defined but abstract templates. Meta-Control stands out for its fully model-based nature, allowing for rigorous analysis, efficient parameter tuning, and reliable execution. It not only utilizes decades of control expertise encapsulated within LLMs to facilitate heterogeneous control but also ensures formal guarantees such as safety and stability. Our method is validated both in real-world scenarios and simulations across diverse tasks with conflicting requirements, such as collision avoidance versus convergence and compliance versus high precision. Videos and additional results are at meta-control-paper.github.io