 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta Adaptation using Importance Weighted Demonstrations
Paper and Code
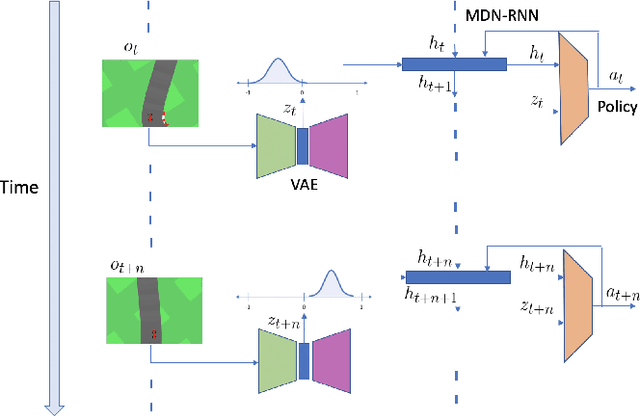
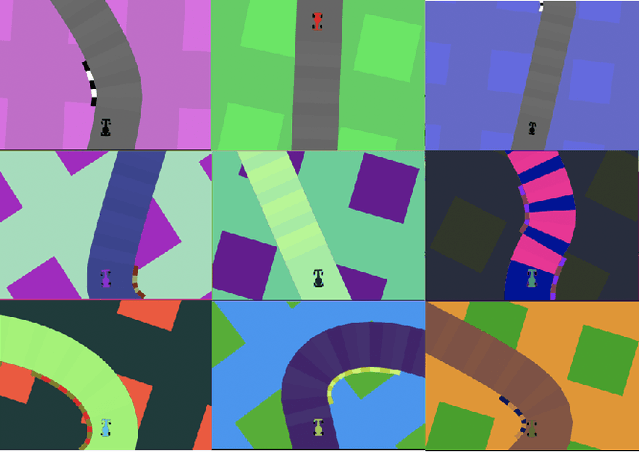
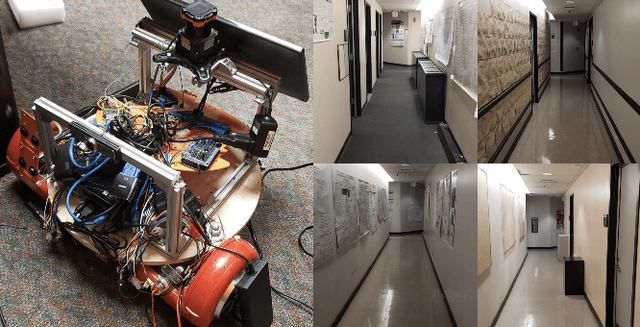
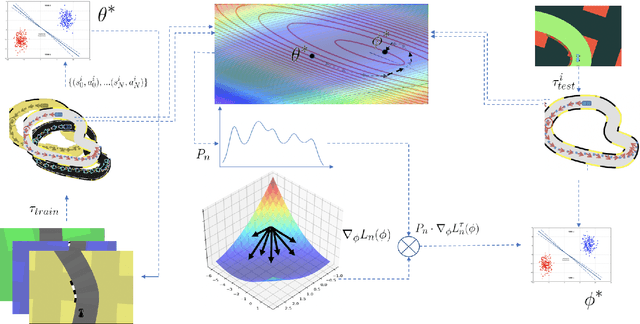
Imitation learning has gained immense popularity because of its high sample-efficiency. However, in real-world scenarios, where the trajectory distribution of most of the tasks dynamically shifts, model fitting on continuously aggregated data alone would be futile. In some cases, the distribution shifts, so much, that it is difficult for an agent to infer the new task. We propose a novel algorithm to generalize on any related task by leveraging prior knowledge on a set of specific tasks, which involves assigning importance weights to each past demonstration. We show experiments where the robot is trained from a diversity of environmental tasks and is also able to adapt to an unseen environment, using few-shot learning. We also developed a prototype robot system to test our approach on the task of visual navigation, and experimental results obtained were able to confirm these suppositions.