Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMessage Expiration-Based Distributed Multi-Robot Task Management
Paper and Code
Jan 08, 2022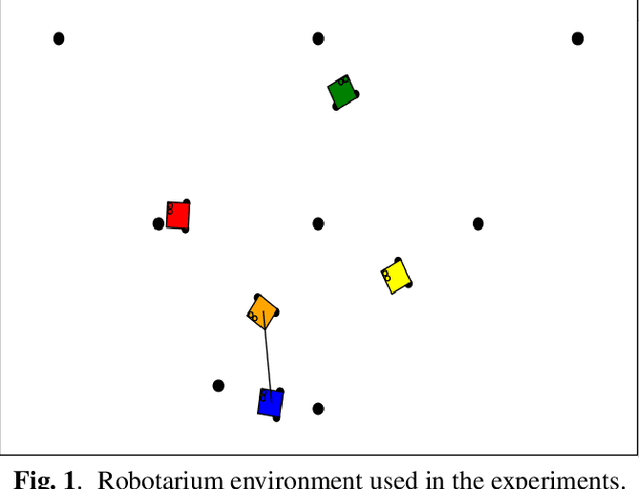
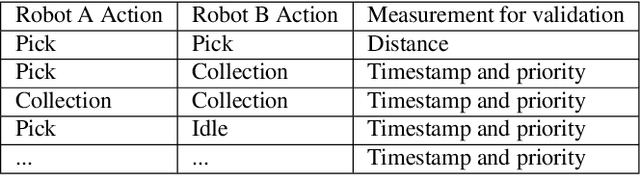

Distributed task assignment for multiple agents raises fundamental and novel control theory and robotics problems. A new challenge is the development of distributed algorithms that dynamically assign tasks to multiple agents, not relying on prior assignment information. This work presents a distributed method for multi-robot task management based on a message expiration-based validation approach. Our approach handles the conflicts caused by a disconnection in the distributed multi-robot system by using distance-based and timestamp-based measurements to validate the task allocation for each robot. Simulation experiments in the Robotarium simulator platform have verified the validity of the proposed approach.
* Accepted for Oral Presentation at the SWARM 2022 Conference
View paper on