 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMechanical Chameleons: Evaluating the effects of a social robot's non-verbal behavior on social influence
Paper and Code
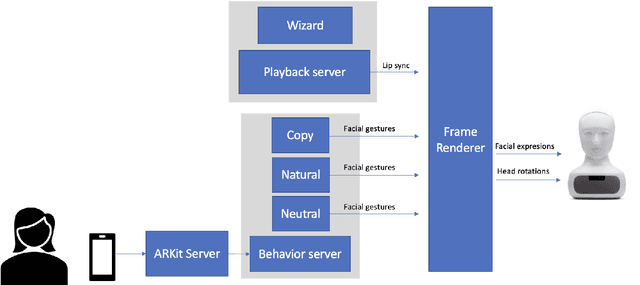
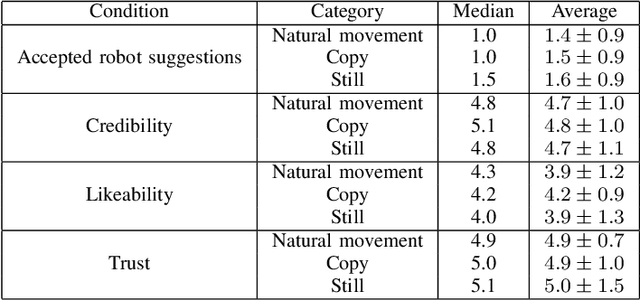
In this paper we present a pilot study which investigates how non-verbal behavior affects social influence in social robots. We also present a modular system which is capable of controlling the non-verbal behavior based on the interlocutor's facial gestures (head movements and facial expressions) in real time, and a study investigating whether three different strategies for facial gestures ("still", "natural movement", i.e. movements recorded from another conversation, and "copy", i.e. mimicking the user with a four second delay) has any affect on social influence and decision making in a "survival task". Our preliminary results show there was no significant difference between the three conditions, but this might be due to among other things a low number of study participants (12).