 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring and avoiding side effects using relative reachability
Paper and Code
Jun 04, 2018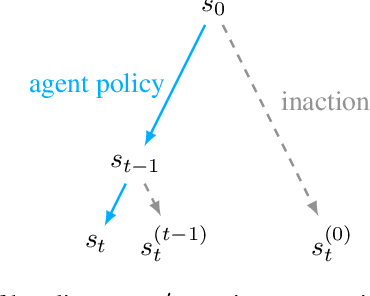
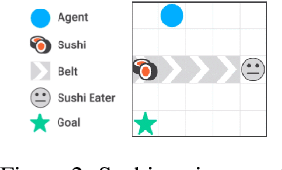
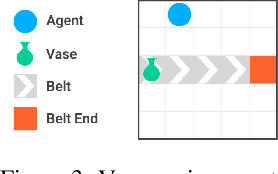
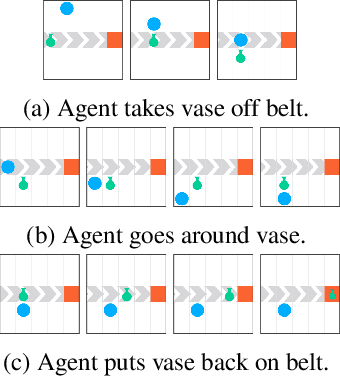
How can we design reinforcement learning agents that avoid causing unnecessary disruptions to their environment? We argue that current approaches to penalizing side effects can introduce bad incentives in tasks that require irreversible actions, and in environments that contain sources of change other than the agent. For example, some approaches give the agent an incentive to prevent any irreversible changes in the environment, including the actions of other agents. We introduce a general definition of side effects, based on relative reachability of states compared to a default state, that avoids these undesirable incentives. Using a set of gridworld experiments illustrating relevant scenarios, we empirically compare relative reachability to penalties based on existing definitions and show that it is the only penalty among those tested that produces the desired behavior in all the scenarios.