 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeME-PCN: Point Completion Conditioned on Mask Emptiness
Paper and Code
Aug 18, 2021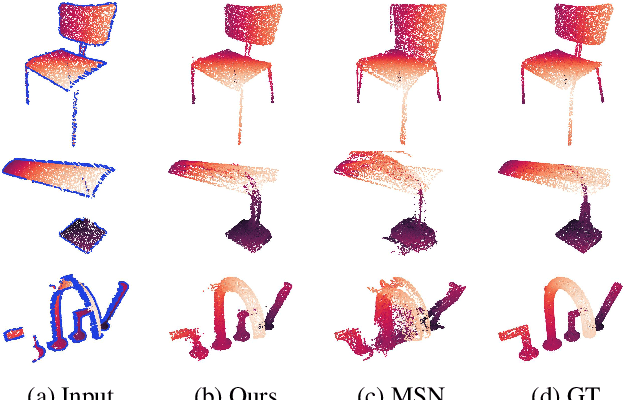
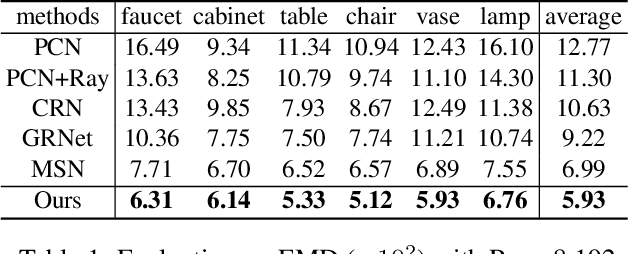
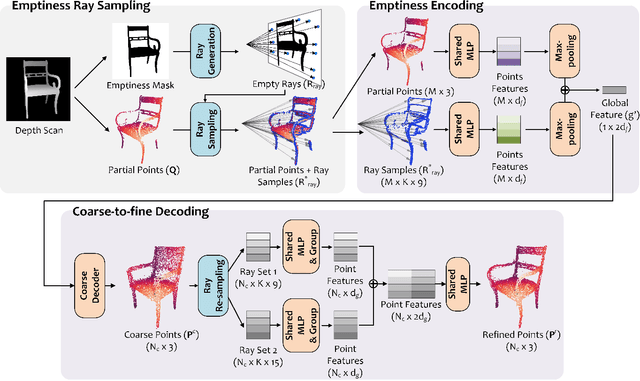
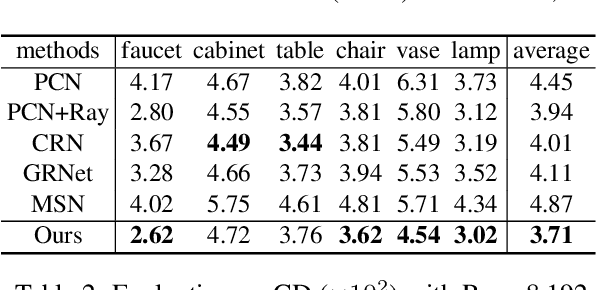
Point completion refers to completing the missing geometries of an object from incomplete observations. Main-stream methods predict the missing shapes by decoding a global feature learned from the input point cloud, which often leads to deficient results in preserving topology consistency and surface details. In this work, we present ME-PCN, a point completion network that leverages `emptiness' in 3D shape space. Given a single depth scan, previous methods often encode the occupied partial shapes while ignoring the empty regions (e.g. holes) in depth maps. In contrast, we argue that these `emptiness' clues indicate shape boundaries that can be used to improve topology representation and detail granularity on surfaces. Specifically, our ME-PCN encodes both the occupied point cloud and the neighboring `empty points'. It estimates coarse-grained but complete and reasonable surface points in the first stage, followed by a refinement stage to produce fine-grained surface details. Comprehensive experiments verify that our ME-PCN presents better qualitative and quantitative performance against the state-of-the-art. Besides, we further prove that our `emptiness' design is lightweight and easy to embed in existing methods, which shows consistent effectiveness in improving the CD and EMD scores.