 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximum-Likelihood Inverse Reinforcement Learning with Finite-Time Guarantees
Paper and Code
Oct 04, 2022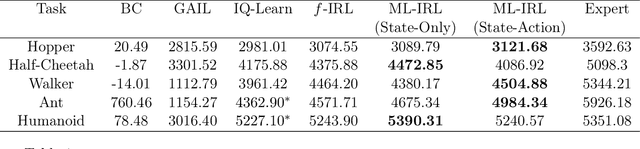

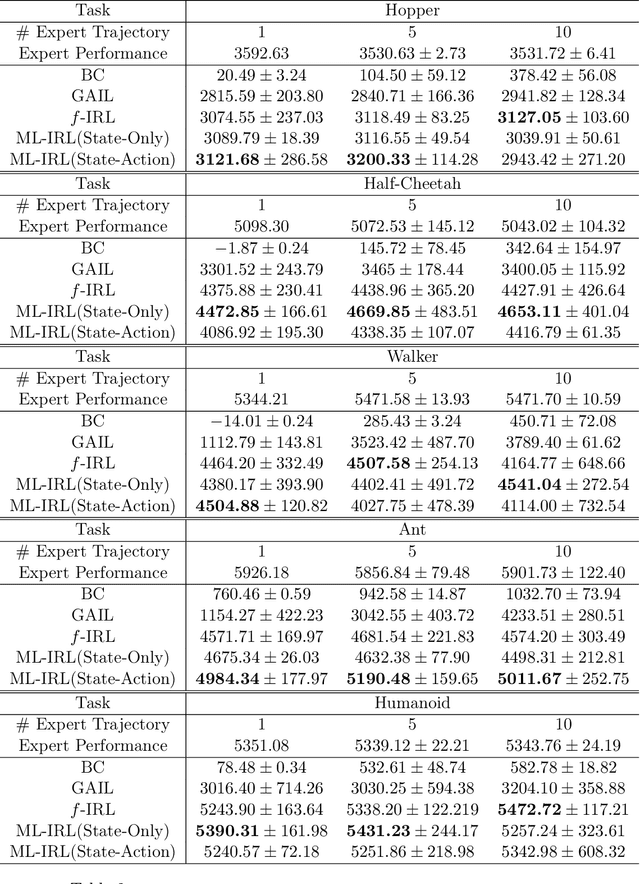
Inverse reinforcement learning (IRL) aims to recover the reward function and the associated optimal policy that best fits observed sequences of states and actions implemented by an expert. Many algorithms for IRL have an inherently nested structure: the inner loop finds the optimal policy given parametrized rewards while the outer loop updates the estimates towards optimizing a measure of fit. For high dimensional environments such nested-loop structure entails a significant computational burden. To reduce the computational burden of a nested loop, novel methods such as SQIL [1] and IQ-Learn [2] emphasize policy estimation at the expense of reward estimation accuracy. However, without accurate estimated rewards, it is not possible to do counterfactual analysis such as predicting the optimal policy under different environment dynamics and/or learning new tasks. In this paper we develop a novel single-loop algorithm for IRL that does not compromise reward estimation accuracy. In the proposed algorithm, each policy improvement step is followed by a stochastic gradient step for likelihood maximization. We show that the proposed algorithm provably converges to a stationary solution with a finite-time guarantee. If the reward is parameterized linearly, we show the identified solution corresponds to the solution of the maximum entropy IRL problem. Finally, by using robotics control problems in MuJoCo and their transfer settings, we show that the proposed algorithm achieves superior performance compared with other IRL and imitation learning benchmarks.