 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximum-Entropy Multi-Agent Dynamic Games: Forward and Inverse Solutions
Paper and Code
Oct 03, 2021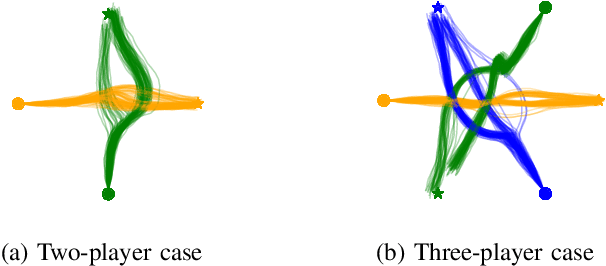


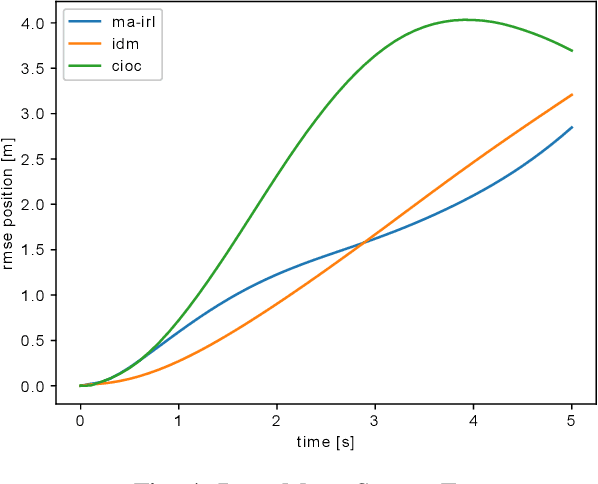
In this paper, we study the problem of multiple stochastic agents interacting in a dynamic game scenario with continuous state and action spaces. We define a new notion of stochastic Nash equilibrium for boundedly rational agents, which we call the Entropic Cost Equilibrium (ECE). We show that ECE is a natural extension to multiple agents of Maximum Entropy optimality for single agents. We solve both the "forward" and "inverse" problems for the multi-agent ECE game. For the forward problem, we provide a Riccati algorithm to compute closed-form ECE feedback policies for the agents, which are exact in the Linear-Quadratic-Gaussian case. We give an iterative variant to find locally ECE feedback policies for the nonlinear case. For the inverse problem, we present an algorithm to infer the cost functions of the multiple interacting agents given noisy, boundedly rational input and state trajectory examples from agents acting in an ECE. The effectiveness of our algorithms is demonstrated in a simulated multi-agent collision avoidance scenario, and with data from the INTERACTION traffic dataset. In both cases, we show that, by taking into account the agents' game theoretic interactions using our algorithm, a more accurate model of agents' costs can be learned, compared with standard inverse optimal control methods.