Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMasking by Moving: Learning Distraction-Free Radar Odometry from Pose Information
Paper and Code
Sep 12, 2019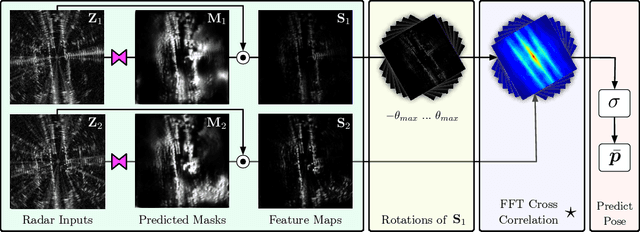
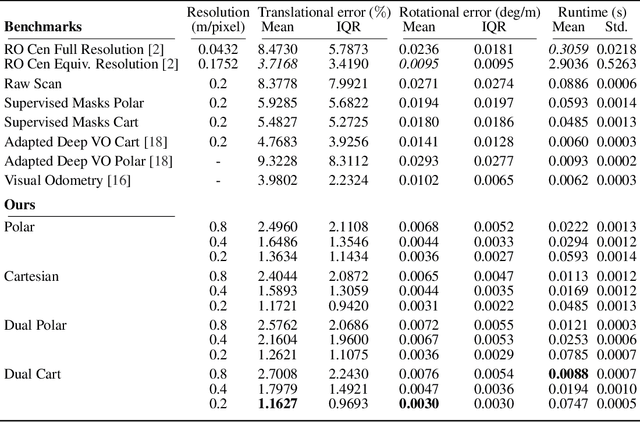
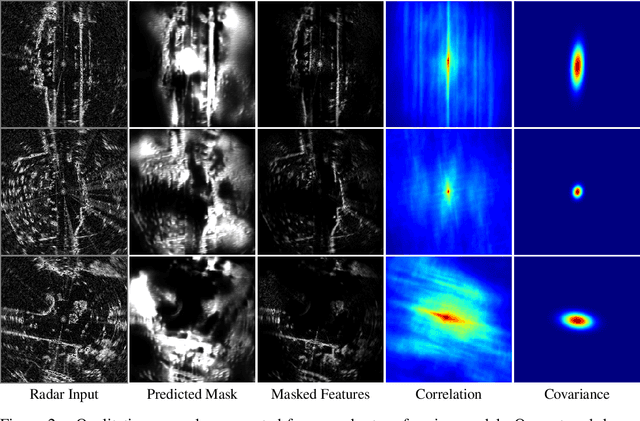
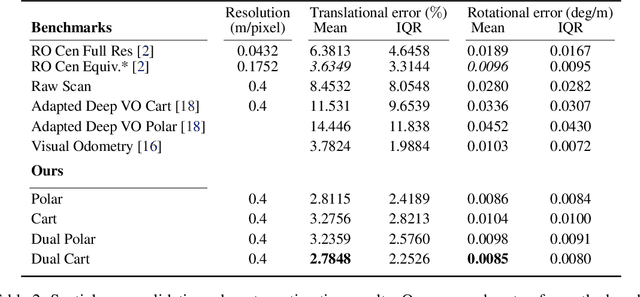
This paper presents an end-to-end radar odometry system which delivers robust, real-time pose estimates based on a learned embedding space free of sensing artefacts and distractor objects. The system deploys a fully differentiable, correlation-based radar matching approach. This provides the same level of interpretability as established scan-matching methods and allows for a principled derivation of uncertainty estimates. The system is trained in a (self-)supervised way using only previously obtained pose information as a training signal. Using 280km of urban driving data, we demonstrate that our approach outperforms the previous state-of-the-art in radar odometry by reducing errors by up 68% whilst running an order of magnitude faster.
* Video summary: https://youtu.be/eG4Q-j3_6dk
View paper on