 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarkovian Gaussian Process Variational Autoencoders
Paper and Code
Jul 12, 2022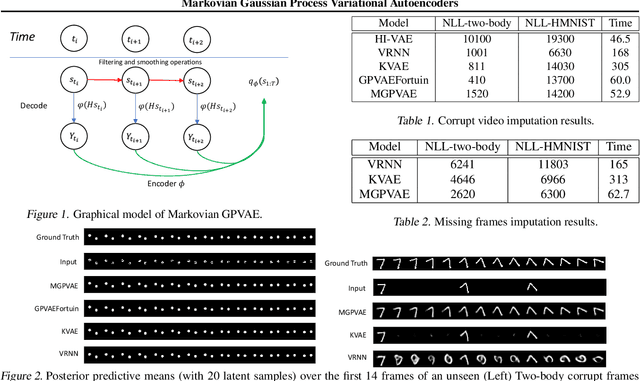
Deep generative models are widely used for modelling high-dimensional time series, such as video animations, audio and climate data. Sequential variational autoencoders have been successfully considered for many applications, with many variant models relying on discrete-time methods and recurrent neural networks (RNNs). On the other hand, continuous-time methods have recently gained attraction, especially in the context of irregularly-sampled time series, where they can better handle the data than discrete-time methods. One such class are Gaussian process variational autoencoders (GPVAEs), where the VAE prior is set as a Gaussian process (GPs), allowing inductive biases to be explicitly encoded via the kernel function and interpretability of the latent space. However, a major limitation of GPVAEs is that it inherits the same cubic computational cost as GPs. In this work, we leverage the equivalent discrete state space representation of Markovian GPs to enable a linear-time GP solver via Kalman filtering and smoothing. We show via corrupt and missing frames tasks that our method performs favourably, especially on the latter where it outperforms RNN-based models.