 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapless-Planner: A Robust and Fast Planning Framework for Aggressive Autonomous Flight without Map Fusion
Paper and Code
Nov 11, 2020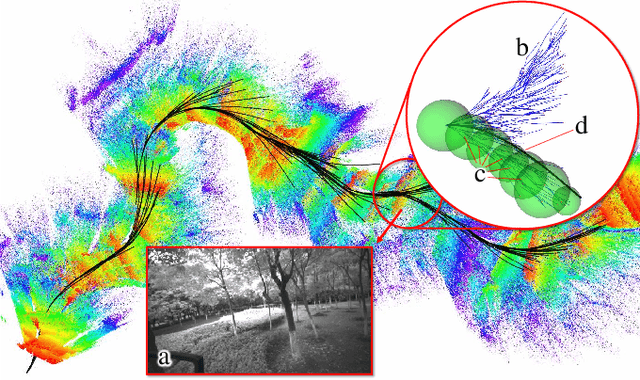
Maintaining a map online is resource-consuming while a robust navigation system usually needs environment abstraction via a well-fused map. In this paper, we propose a mapless planner which directly conducts such abstraction on the unfused sensor data. A limited-memory data structure with a reliable proximity query algorithm is proposed for maintaining raw historical information. A sampling-based scheme is designed to extract the free-space skeleton. A smart waypoint selection strategy enables to generate high-quality trajectories within the resultant flight corridors. Our planner differs from other mapless ones in that it can abstract and exploit the environment information efficiently. The online replan consistency and success rate are both significantly improved against conventional mapless methods.