Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeManaging Bandwidth: The Key to Cloud-Assisted Autonomous Driving
Paper and Code
Oct 21, 2024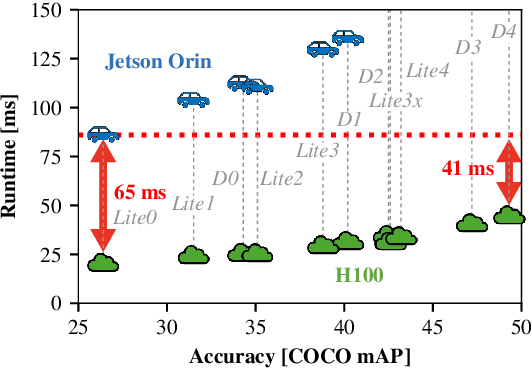
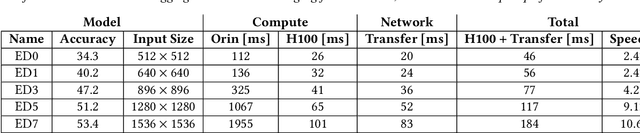

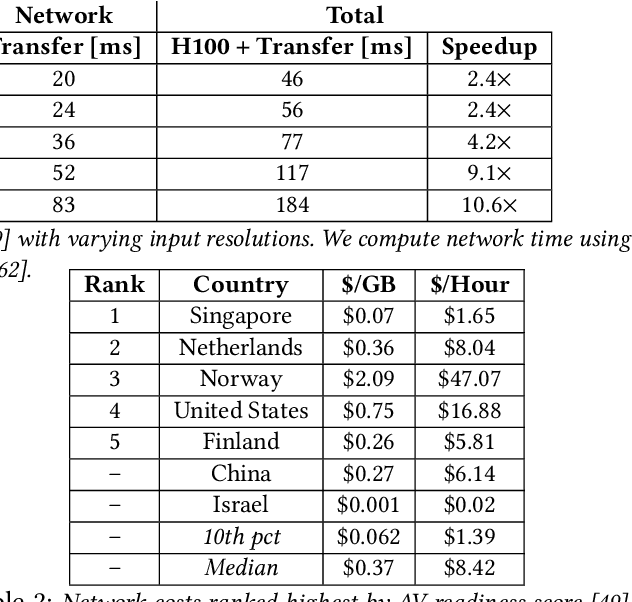
Prevailing wisdom asserts that one cannot rely on the cloud for critical real-time control systems like self-driving cars. We argue that we can, and must. Following the trends of increasing model sizes, improvements in hardware, and evolving mobile networks, we identify an opportunity to offload parts of time-sensitive and latency-critical compute to the cloud. Doing so requires carefully allocating bandwidth to meet strict latency SLOs, while maximizing benefit to the car.
* 6 pages
View paper on