 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM${^2}$Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
Paper and Code
May 03, 2024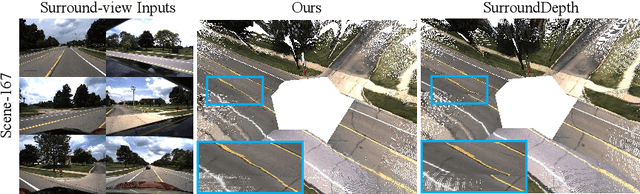
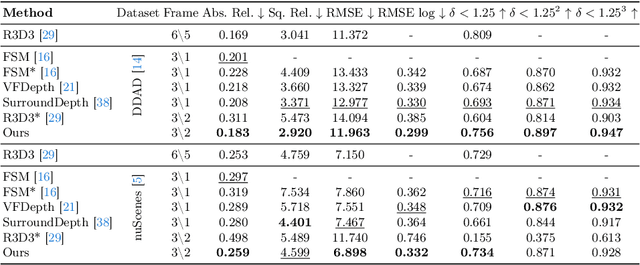
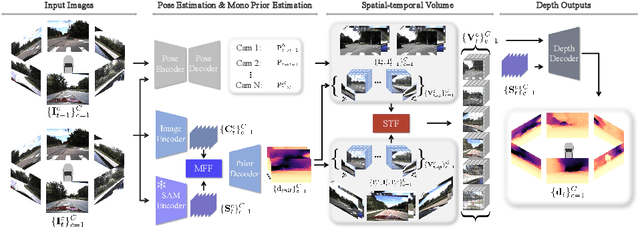
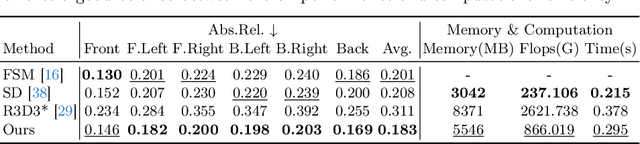
This paper presents a novel self-supervised two-frame multi-camera metric depth estimation network, termed M${^2}$Depth, which is designed to predict reliable scale-aware surrounding depth in autonomous driving. Unlike the previous works that use multi-view images from a single time-step or multiple time-step images from a single camera, M${^2}$Depth takes temporally adjacent two-frame images from multiple cameras as inputs and produces high-quality surrounding depth. We first construct cost volumes in spatial and temporal domains individually and propose a spatial-temporal fusion module that integrates the spatial-temporal information to yield a strong volume presentation. We additionally combine the neural prior from SAM features with internal features to reduce the ambiguity between foreground and background and strengthen the depth edges. Extensive experimental results on nuScenes and DDAD benchmarks show M${^2}$Depth achieves state-of-the-art performance. More results can be found in https://heiheishuang.xyz/M2Depth .