 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLunar Crater Identification in Digital Images
Paper and Code
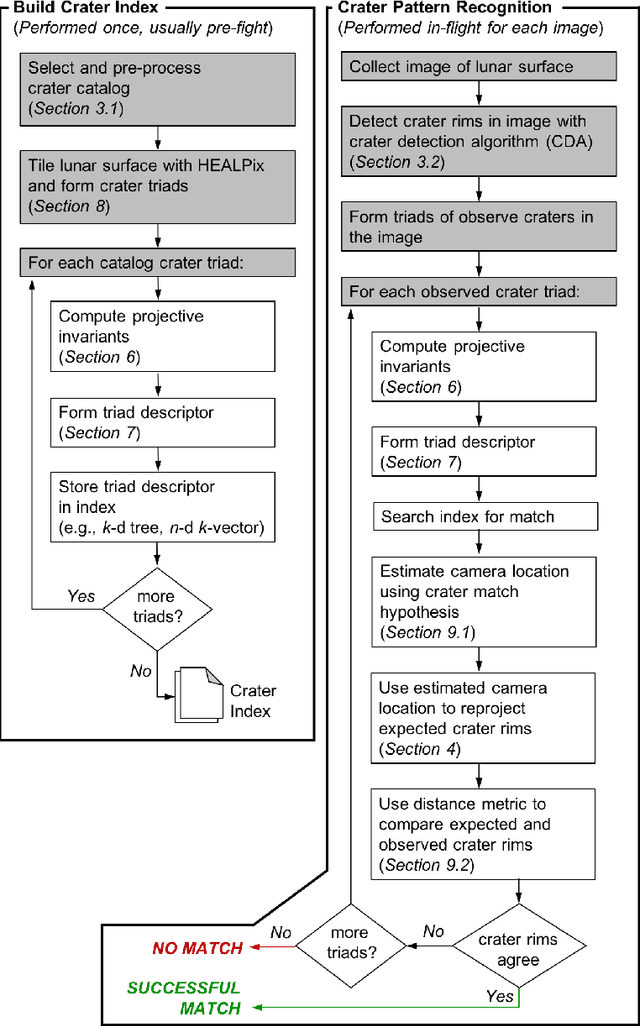
It is often necessary to identify a pattern of observed craters in a single image of the lunar surface and without any prior knowledge of the camera's location. This so-called "lost-in-space" crater identification problem is common in both crater-based terrain relative navigation (TRN) and in automatic registration of scientific imagery. Past work on crater identification has largely been based on heuristic schemes, with poor performance outside of a narrowly defined operating regime (e.g., nadir pointing images, small search areas). This work provides the first mathematically rigorous treatment of the general crater identification problem. It is shown when it is (and when it is not) possible to recognize a pattern of elliptical crater rims in an image formed by perspective projection. For the cases when it is possible to recognize a pattern, descriptors are developed using invariant theory that provably capture all of the viewpoint invariant information. These descriptors may be pre-computed for known crater patterns and placed in a searchable index for fast recognition. New techniques are also developed for computing pose from crater rim observations and for evaluating crater rim correspondences. These techniques are demonstrated on both synthetic and real images.