 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLogic Dynamic Movement Primitives for Long-horizon Manipulation Tasks in Dynamic Environments
Paper and Code
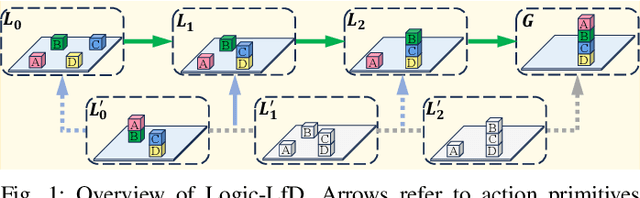
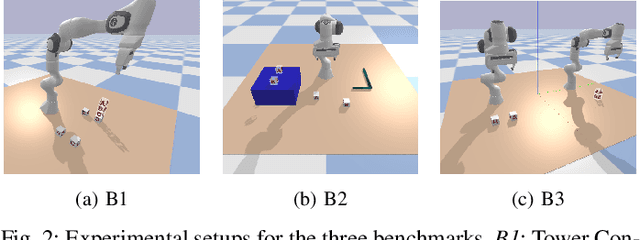
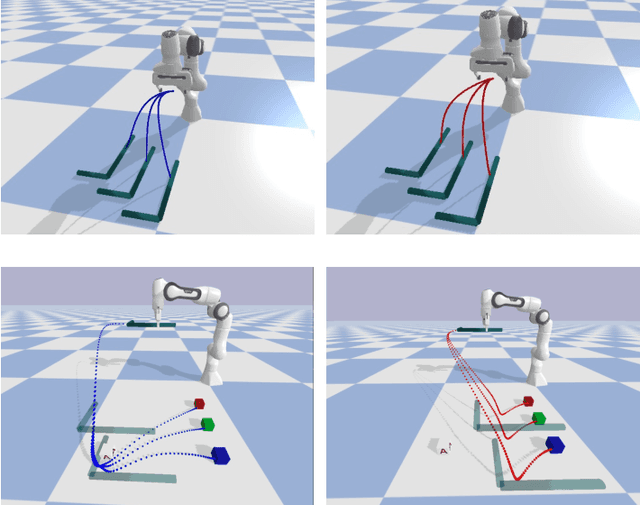

Learning from Demonstration (LfD) stands as an efficient framework for imparting human-like skills to robots. Nevertheless, designing an LfD framework capable of seamlessly imitating, generalizing, and reacting to disturbances for long-horizon manipulation tasks in dynamic environments remains a challenge. To tackle this challenge, we present Logic Dynamic Movement Primitives (Logic-DMP), which combines Task and Motion Planning (TAMP) with an optimal control formulation of DMP, allowing us to incorporate motion-level via-point specifications and to handle task-level variations or disturbances in dynamic environments. We conduct a comparative analysis of our proposed approach against several baselines, evaluating its generalization ability and reactivity across three long-horizon manipulation tasks. Our experiment demonstrates the fast generalization and reactivity of Logic-DMP for handling task-level variants and disturbances in long-horizon manipulation tasks.