 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalize to Classify and Classify to Localize: Mutual Guidance in Object Detection
Paper and Code
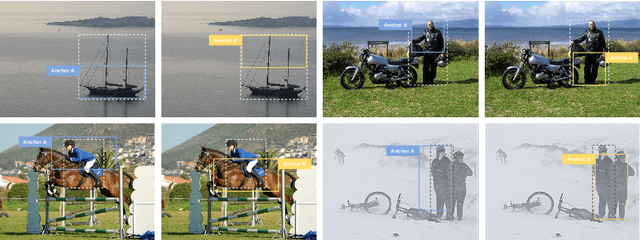
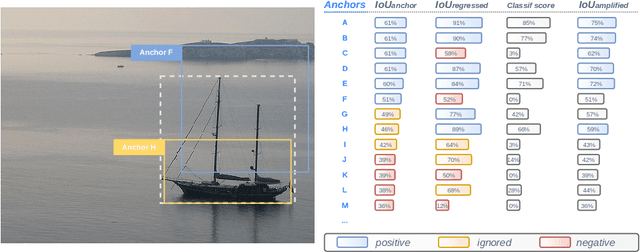
Most deep learning object detectors are based on the anchor mechanism and resort to the Intersection over Union (IoU) between predefined anchor boxes and ground truth boxes to evaluate the matching quality between anchors and objects. In this paper, we question this use of IoU and propose a new anchor matching criterion guided, during the training phase, by the optimization of both the localization and the classification tasks: the predictions related to one task are used to dynamically assign sample anchors and improve the model on the other task, and vice versa. Despite the simplicity of the proposed method, our experiments with different state-of-the-art deep learning architectures on PASCAL VOC and MS COCO datasets demonstrate the effectiveness and generality of our Mutual Guidance strategy.