 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocalBins: Improving Depth Estimation by Learning Local Distributions
Paper and Code
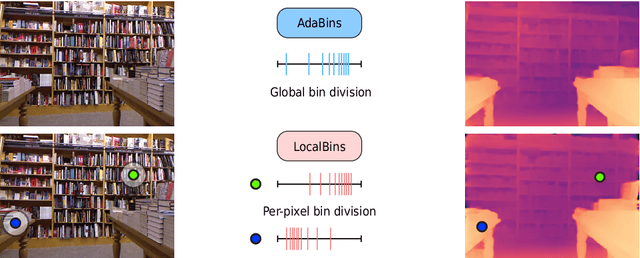



We propose a novel architecture for depth estimation from a single image. The architecture itself is based on the popular encoder-decoder architecture that is frequently used as a starting point for all dense regression tasks. We build on AdaBins which estimates a global distribution of depth values for the input image and evolve the architecture in two ways. First, instead of predicting global depth distributions, we predict depth distributions of local neighborhoods at every pixel. Second, instead of predicting depth distributions only towards the end of the decoder, we involve all layers of the decoder. We call this new architecture LocalBins. Our results demonstrate a clear improvement over the state-of-the-art in all metrics on the NYU-Depth V2 dataset. Code and pretrained models will be made publicly available.