 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLMR: Lane Distance-Based Metric for Trajectory Prediction
Paper and Code
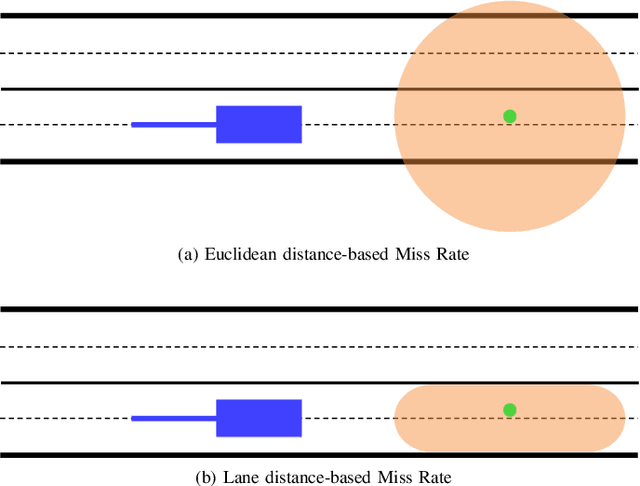
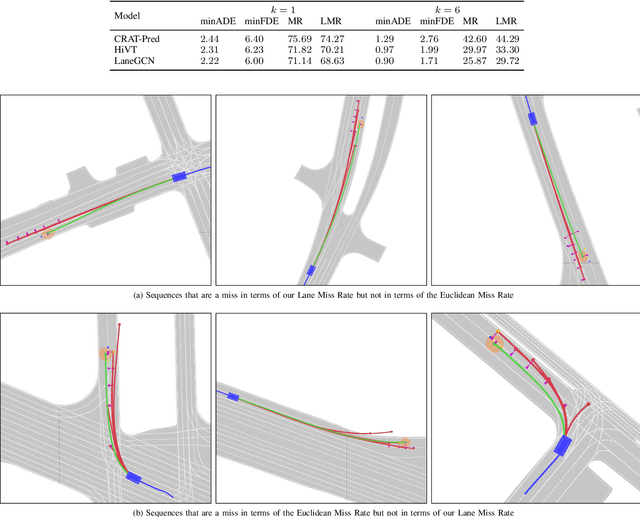
The development of approaches for trajectory prediction requires metrics to validate and compare their performance. Currently established metrics are based on Euclidean distance, which means that errors are weighted equally in all directions. Euclidean metrics are insufficient for structured environments like roads, since they do not properly capture the agent's intent relative to the underlying lane. In order to provide a reasonable assessment of trajectory prediction approaches with regard to the downstream planning task, we propose a new metric that is lane distance-based: Lane Miss Rate (LMR). For the calculation of LMR, the ground-truth and predicted endpoints are assigned to lane segments, more precisely their centerlines. Measured by the distance along the lane segments, predictions that are within a certain threshold distance to the ground-truth count as hits, otherwise they count as misses. LMR is then defined as the ratio of sequences that yield a miss. Our results on three state-of-the-art trajectory prediction models show that LMR preserves the order of Euclidean distance-based metrics. In contrast to the Euclidean Miss Rate, qualitative results show that LMR yields misses for sequences where predictions are located on wrong lanes. Hits on the other hand result for sequences where predictions are located on the correct lane. This means that LMR implicitly weights Euclidean error relative to the lane and goes into the direction of capturing intents of traffic agents. The source code of LMR for Argoverse 2 is publicly available.