 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLite-HDSeg: LiDAR Semantic Segmentation Using Lite Harmonic Dense Convolutions
Paper and Code
Mar 16, 2021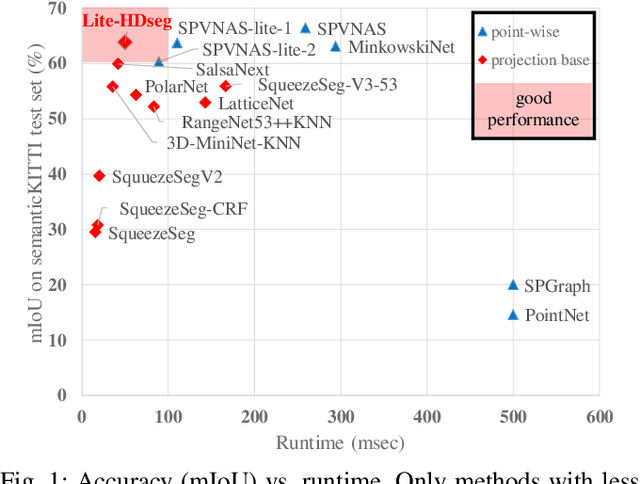
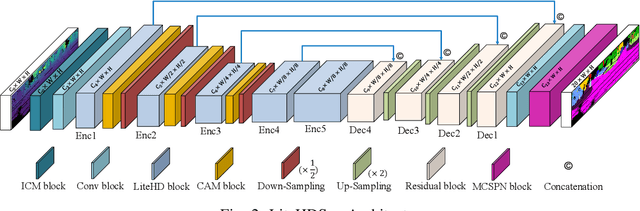
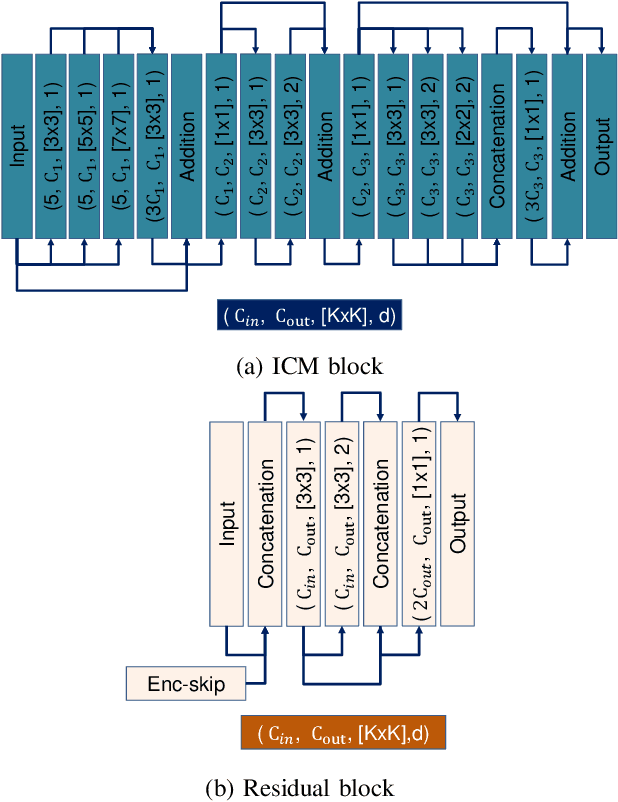
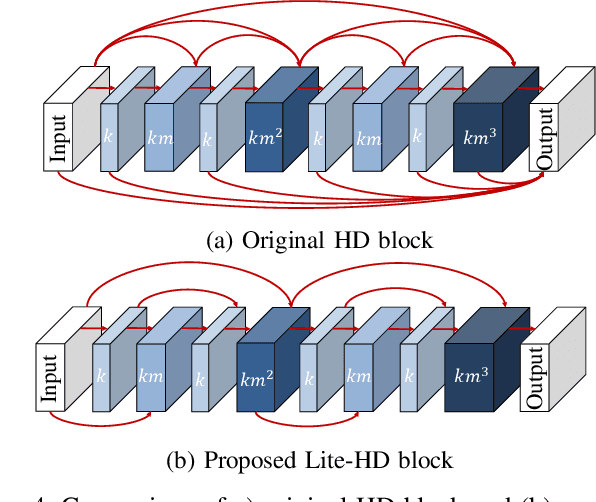
Autonomous driving vehicles and robotic systems rely on accurate perception of their surroundings. Scene understanding is one of the crucial components of perception modules. Among all available sensors, LiDARs are one of the essential sensing modalities of autonomous driving systems due to their active sensing nature with high resolution of sensor readings. Accurate and fast semantic segmentation methods are needed to fully utilize LiDAR sensors for scene understanding. In this paper, we present Lite-HDSeg, a novel real-time convolutional neural network for semantic segmentation of full $3$D LiDAR point clouds. Lite-HDSeg can achieve the best accuracy vs. computational complexity trade-off in SemanticKitti benchmark and is designed on the basis of a new encoder-decoder architecture with light-weight harmonic dense convolutions as its core. Moreover, we introduce ICM, an improved global contextual module to capture multi-scale contextual features, and MCSPN, a multi-class Spatial Propagation Network to further refine the semantic boundaries. Our experimental results show that the proposed method outperforms state-of-the-art semantic segmentation approaches which can run real-time, thus is suitable for robotic and autonomous driving applications.