 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLINKS: A dataset of a hundred million planar linkage mechanisms for data-driven kinematic design
Paper and Code

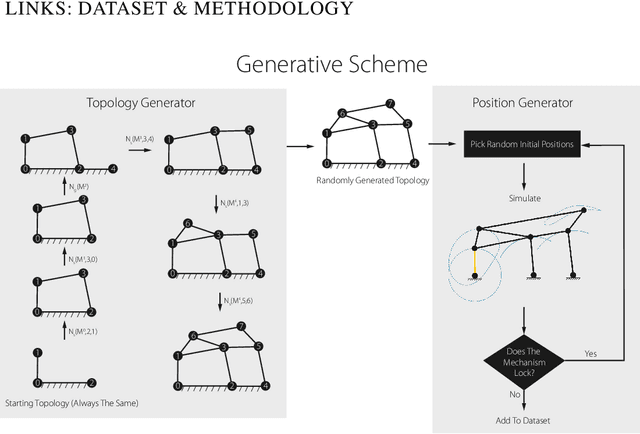
In this paper, we introduce LINKS, a dataset of 100 million one degree of freedom planar linkage mechanisms and 1.1 billion coupler curves, which is more than 1000 times larger than any existing database of planar mechanisms and is not limited to specific kinds of mechanisms such as four-bars, six-bars, \etc which are typically what most databases include. LINKS is made up of various components including 100 million mechanisms, the simulation data for each mechanism, normalized paths generated by each mechanism, a curated set of paths, the code used to generate the data and simulate mechanisms, and a live web demo for interactive design of linkage mechanisms. The curated paths are provided as a measure for removing biases in the paths generated by mechanisms that enable a more even design space representation. In this paper, we discuss the details of how we can generate such a large dataset and how we can overcome major issues with such scales. To be able to generate such a large dataset we introduce a new operator to generate 1-DOF mechanism topologies, furthermore, we take many steps to speed up slow simulations of mechanisms by vectorizing our simulations and parallelizing our simulator on a large number of threads, which leads to a simulation 800 times faster than the simple simulation algorithm. This is necessary given on average, 1 out of 500 candidates that are generated are valid~(and all must be simulated to determine their validity), which means billions of simulations must be performed for the generation of this dataset. Then we demonstrate the depth of our dataset through a bi-directional chamfer distance-based shape retrieval study where we show how our dataset can be used directly to find mechanisms that can trace paths very close to desired target paths.