 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Differential Games for Cooperative Behavior Planning of Autonomous Vehicles Using Mixed-Integer Programming
Paper and Code
Sep 30, 2021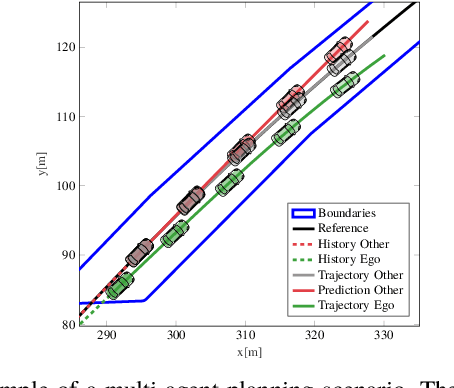



Cooperatively planning for multiple agents has been proposed as a promising method for strategic and motion planning for automated vehicles. By taking into account the intent of every agent, the ego agent can incorporate future interactions with human-driven vehicles into its planning. The problem is often formulated as a multi-agent game and solved using iterative algorithms operating on a discretized action or state space. Even if converging to a Nash equilibrium, the result will often be only sub-optimal. In this paper, we define a linear differential game for a set of interacting agents and solve it to optimality using mixed-integer programming. A disjunctive formulation of the orientation allows us to formulate linear constraints to prevent agent-to-agent collision while preserving the non-holonomic motion properties of the vehicle model. Soft constraints account for prediction errors. We then define a joint cost function, where a cooperation factor can adapt between altruistic, cooperative, and egoistic behavior. We study the influence of the cooperation factor to solve scenarios, where interaction between the agents is necessary to solve them successfully. The approach is then evaluated in a racing scenario, where we show the applicability of the formulation in a closed-loop receding horizon replanning fashion. By accounting for inaccuracies in the cooperative assumption and the actual behavior, we can indeed successfully plan an optimal control strategy interacting closely with other agents.