 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifelong Topological Visual Navigation
Paper and Code
Oct 16, 2021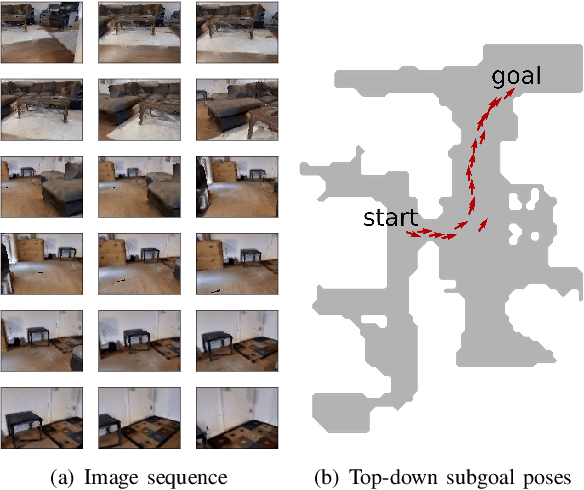

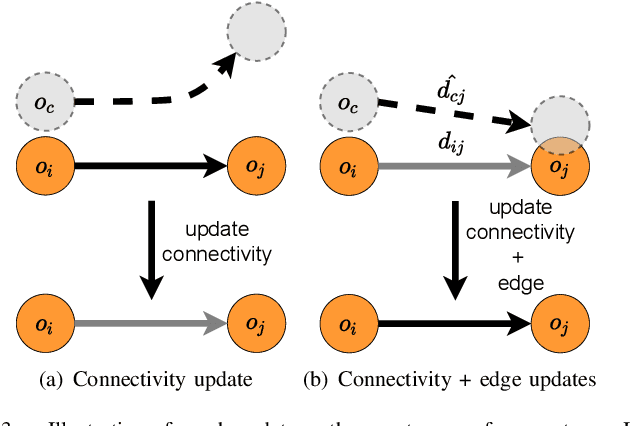
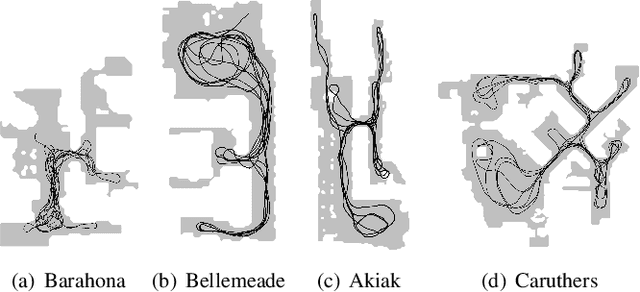
The ability for a robot to navigate with only the use of vision is appealing due to its simplicity. Traditional vision-based navigation approaches required a prior map-building step that was arduous and prone to failure, or could only exactly follow previously executed trajectories. Newer learning-based visual navigation techniques reduce the reliance on a map and instead directly learn policies from image inputs for navigation. There are currently two prevalent paradigms: end-to-end approaches forego the explicit map representation entirely, and topological approaches which still preserve some loose connectivity of the space. However, while end-to-end methods tend to struggle in long-distance navigation tasks, topological map-based solutions are prone to failure due to spurious edges in the graph. In this work, we propose a learning-based topological visual navigation method with graph update strategies that improve lifelong navigation performance over time. We take inspiration from sampling-based planning algorithms to build image-based topological graphs, resulting in sparser graphs yet with higher navigation performance compared to baseline methods. Also, unlike controllers that learn from fixed training environments, we show that our model can be finetuned using a relatively small dataset from the real-world environment where the robot is deployed. We further assess performance of our system in real-world deployments.