 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifelong Learning of Spatiotemporal Representations with Dual-Memory Recurrent Self-Organization
Paper and Code
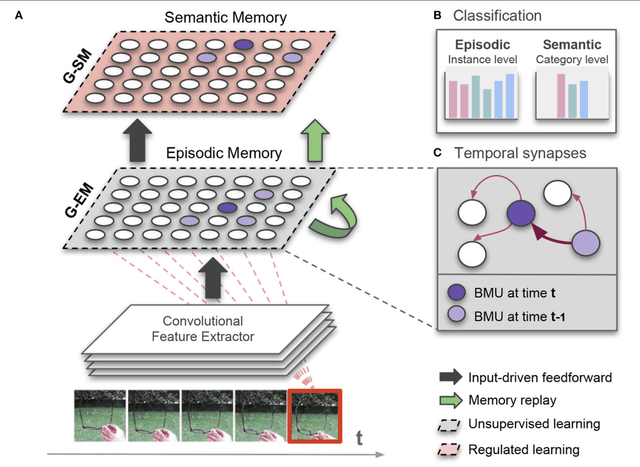
Artificial autonomous agents and robots interacting in complex environments are required to continually acquire and fine-tune knowledge over sustained periods of time. The ability to learn from continuous streams of information is referred to as lifelong learning and represents a long-standing challenge for neural network models due to catastrophic forgetting. Computational models of lifelong learning typically alleviate catastrophic forgetting in experimental scenarios with given datasets of static images and limited complexity, thereby differing significantly from the conditions artificial agents are exposed to. In more natural settings, sequential information may become progressively available over time and access to previous experience may be restricted. In this paper, we propose a dual-memory self-organizing architecture for lifelong learning scenarios. The architecture comprises two growing recurrent networks with the complementary tasks of learning object instances (episodic memory) and categories (semantic memory). Both growing networks can expand in response to novel sensory experience: the episodic memory learns fine-grained spatiotemporal representations of object instances in an unsupervised fashion while the semantic memory uses task-relevant signals to regulate structural plasticity levels and develop more compact representations from episodic experience. For the consolidation of knowledge in the absence of external sensory input, the episodic memory periodically replays trajectories of neural reactivations. We evaluate the proposed model on the CORe50 benchmark dataset for continuous object recognition, showing that we significantly outperform current methods of lifelong learning in three different incremental learning scenarios