Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiePoseNet: Heterogeneous Loss Function Based on Lie Group for Significant Speed-up of PoseNet Training Process
Paper and Code
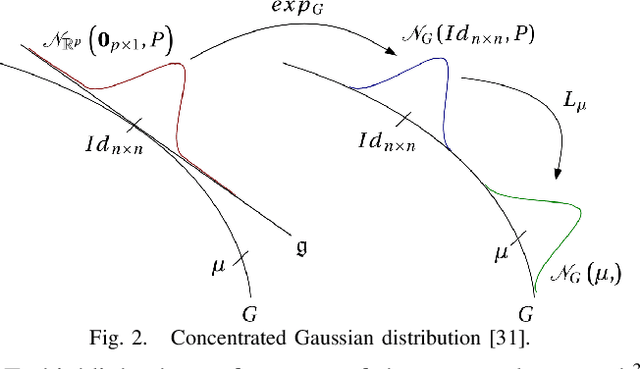
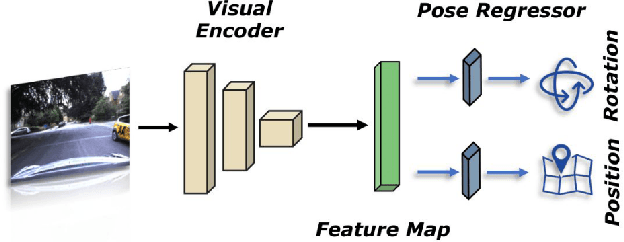
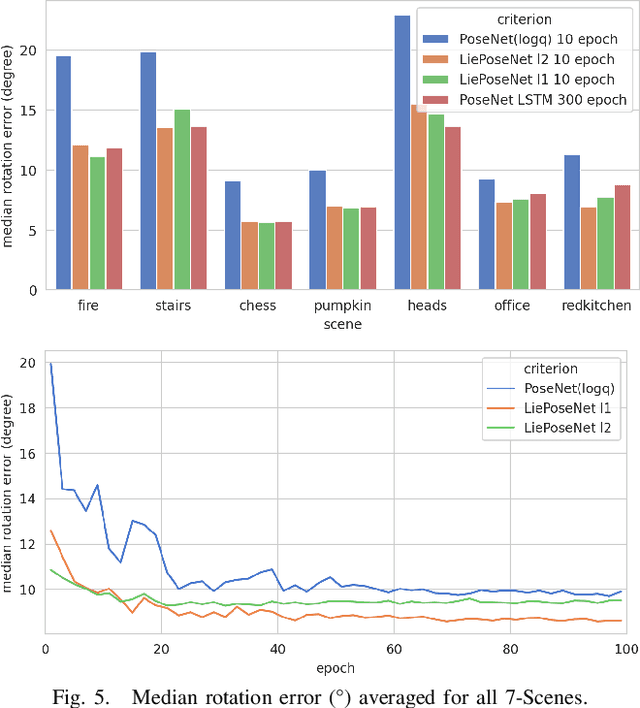
Visual localization is an essential modern technology for robotics and computer vision. Popular approaches for solving this task are image-based methods. Nowadays, these methods have low accuracy and a long training time. The reasons are the lack of rigid-body and projective geometry awareness, landmark symmetry, and homogeneous error assumption. We propose a heterogeneous loss function based on concentrated Gaussian distribution with the Lie group to overcome these difficulties. Following our experiment, the proposed method allows us to speed up the training process significantly (from 300 to 10 epochs) with acceptable error values.
* 6 pages, 5 figures
View paper on