 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR Iris for Loop-Closure Detection
Paper and Code
Jan 02, 2020


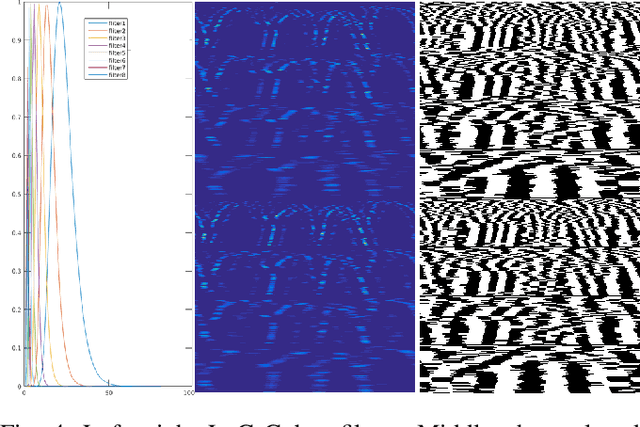
In this paper, a global descriptor for a LiDAR point cloud, called LiDAR Iris, is proposed for fast and accurate loop-closure detection. A binary signature image can be obtained for each point cloud after a couple of LoG-Gabor filtering and thresholding operations on the LiDAR-Iris image representation. Given two point clouds, the similarity of them can be calculated as the hamming-distance of two corresponding binary signature images extracted from the two point clouds, respectively. Our LiDAR-Iris method can achieve a pose-invariant loop-closure detection with the Fourier transform of the LiDAR-Iris representation if assuming a 3D (x,y,yaw) pose space, although our method can generally be applied to a 6D pose space by re-aligning point cloud with an additional IMU sensor. Experimental results on five road-scene sequences demonstrate its excellent performance in loop-closure detection.