 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar-Assisted Acquisition of Mobile Airborne FSO Terminals in a GPS-Denied Environment
Paper and Code
Apr 06, 2023


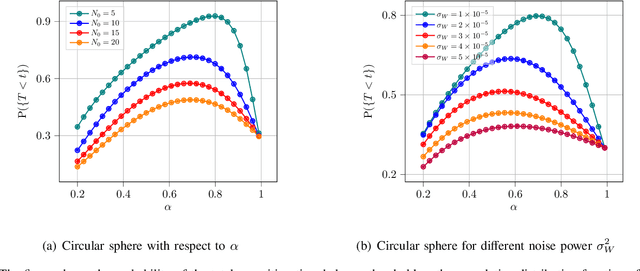
For acquisition of narrow-beam free-space optical (FSO) terminals, a Global Positioning System (GPS) is typically required for coarse localization of the terminal. However, the GPS signal may be shadowed, or may not be present at all, especially in rough or unnameable terrains. In this study, we propose a lidar-assisted acquisition of an unmanned aerial vehicle (UAV) for FSO communications in a poor GPS environment. Such an acquisition system consists of a lidar subsystem and an FSO acquisition subsystem: The lidar subsystem is used for coarse acquisition of the UAV, whereas, the FSO subsystem is utilized for fine acquisition to obtain the UAV's accurate position. This study investigates the optimal allocation of energy between the lidar and FSO subsystems to minimize the acquisition time. Here, we minimize the average acquisition time, and maximize the cumulative distribution function of acquisition time for a fixed threshold. We learn that an optimal value of the energy allocation factor exists that provides the best performance for the proposed acquisition system.