 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidar and Camera Self-Calibration using CostVolume Network
Paper and Code
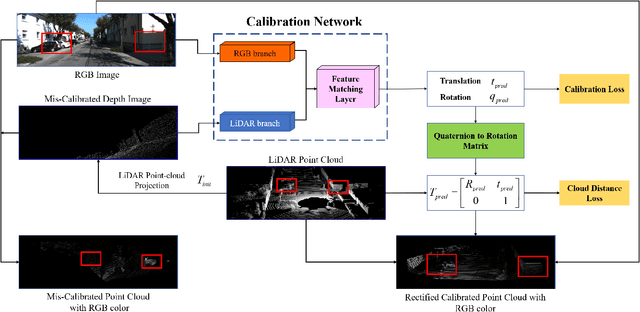
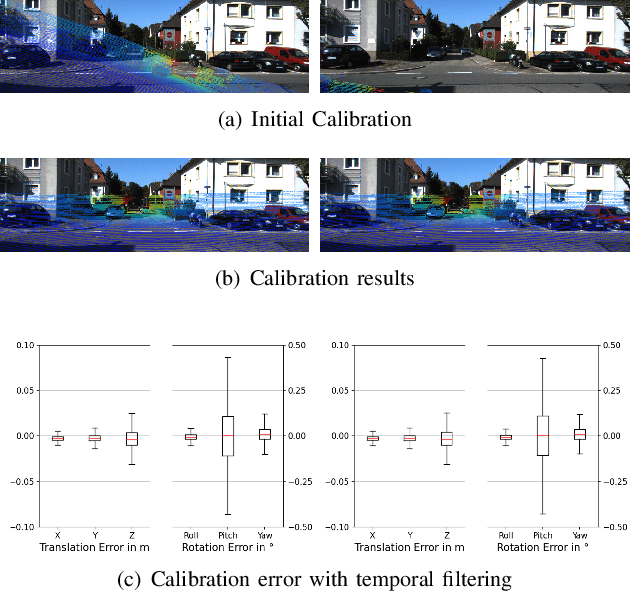
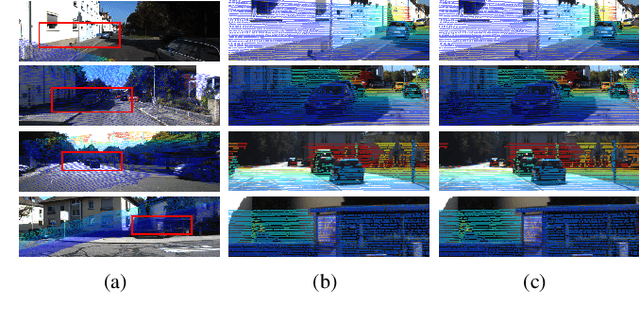

In this paper, we propose a novel online self-calibration approach for Light Detection and Ranging (LiDAR) and camera sensors. Compared to the previous CNN-based methods that concatenate the feature maps of the RGB image and decalibrated depth image, we exploit the cost volume inspired by the PWC-Net for feature matching. Besides the smooth L1-Loss of the predicted extrinsic calibration parameters, an additional point cloud loss is applied. Instead of regress the extrinsic parameters between LiDAR and camera directly, we predict the decalibrated deviation from initial calibration to the ground truth. During inference, the calibration error decreases further with the usage of iterative refinement and the temporal filtering approach. The evaluation results on the KITTI dataset illustrate that our approach outperforms CNN-based state-of-the-art methods in terms of a mean absolute calibration error of 0.297cm in translation and 0.017{\deg} in rotation with miscalibration magnitudes of up to 1.5m and 20{\deg}.