 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging viscous Hamilton-Jacobi PDEs for uncertainty quantification in scientific machine learning
Paper and Code
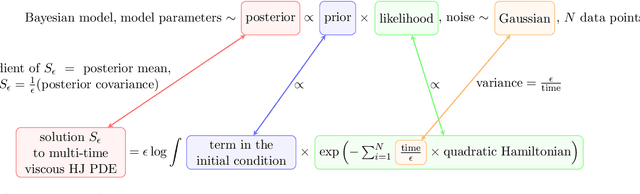

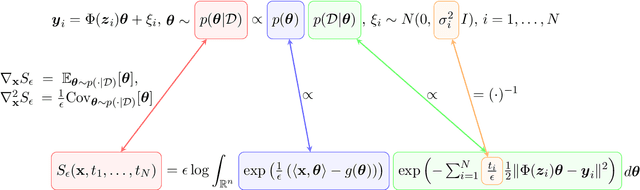

Uncertainty quantification (UQ) in scientific machine learning (SciML) combines the powerful predictive power of SciML with methods for quantifying the reliability of the learned models. However, two major challenges remain: limited interpretability and expensive training procedures. We provide a new interpretation for UQ problems by establishing a new theoretical connection between some Bayesian inference problems arising in SciML and viscous Hamilton-Jacobi partial differential equations (HJ PDEs). Namely, we show that the posterior mean and covariance can be recovered from the spatial gradient and Hessian of the solution to a viscous HJ PDE. As a first exploration of this connection, we specialize to Bayesian inference problems with linear models, Gaussian likelihoods, and Gaussian priors. In this case, the associated viscous HJ PDEs can be solved using Riccati ODEs, and we develop a new Riccati-based methodology that provides computational advantages when continuously updating the model predictions. Specifically, our Riccati-based approach can efficiently add or remove data points to the training set invariant to the order of the data and continuously tune hyperparameters. Moreover, neither update requires retraining on or access to previously incorporated data. We provide several examples from SciML involving noisy data and \textit{epistemic uncertainty} to illustrate the potential advantages of our approach. In particular, this approach's amenability to data streaming applications demonstrates its potential for real-time inferences, which, in turn, allows for applications in which the predicted uncertainty is used to dynamically alter the learning process.